Continuous Engineering and Deep Learning for Trustworthy Autonomous Systems
Deep learning has developed into a mature technology and it is
nowadays an essential part in systems that may include timing and cyber-physical components,
such as self-driving cars, autonomous control systems in medical applications and so on.
We call these systems learning-enabled autonomous systems and we focus on key challenges
in their design and development, which lie in the intersection of the two H2020 research projects
that jointly organize this one-week summer school with prominent invited speakers and hands-on sessions
on related tools and state-of-the-art industrial technologies.
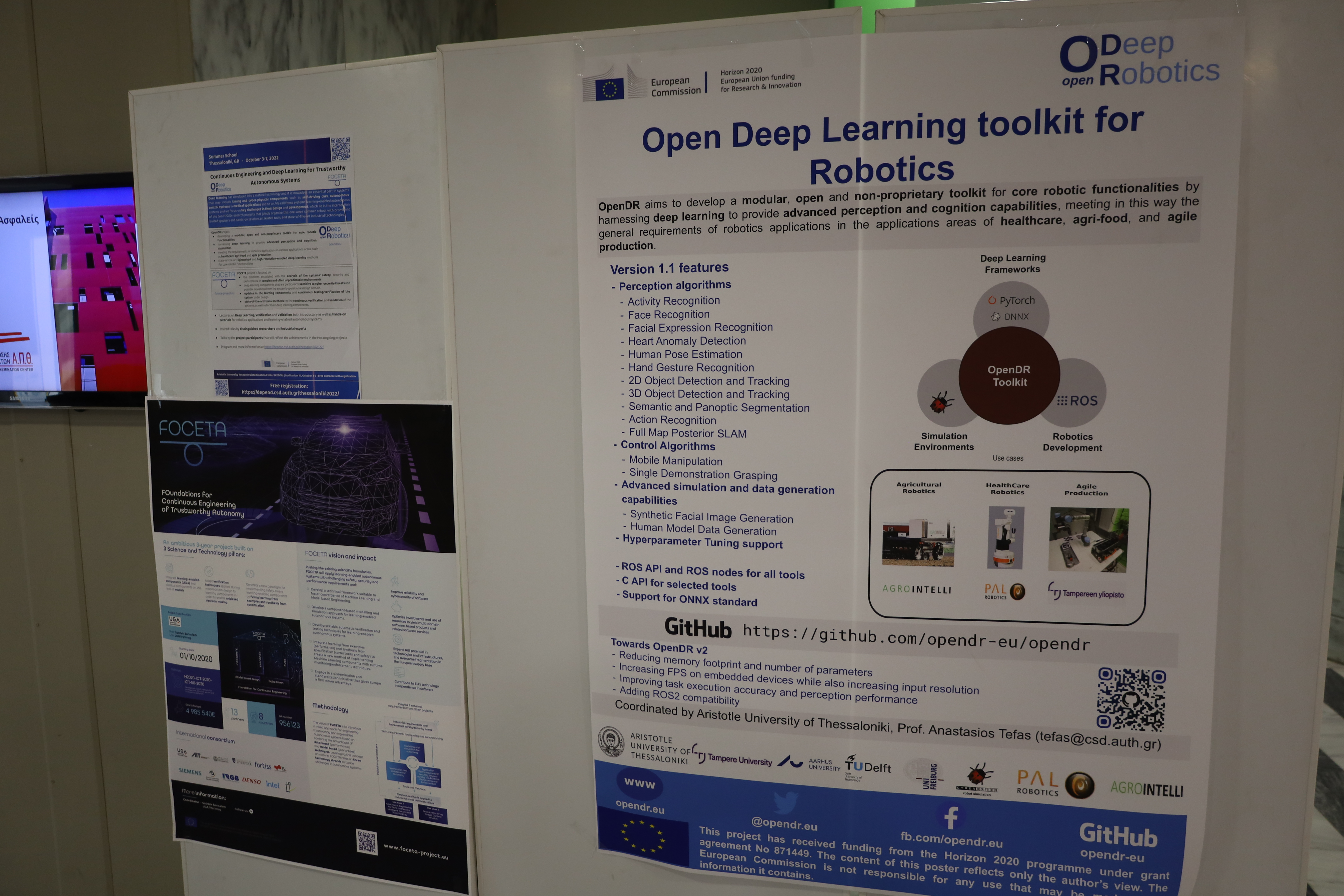
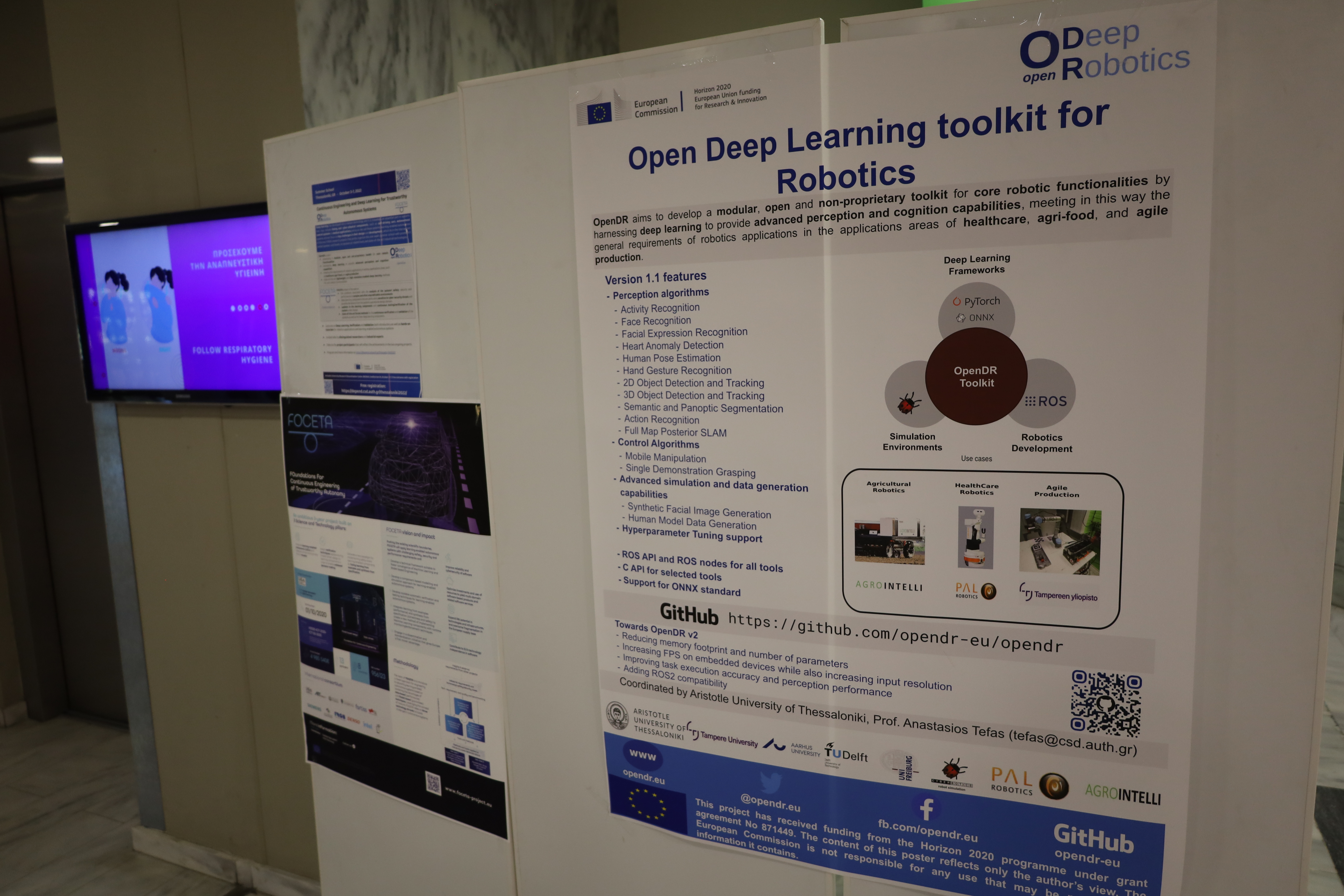
The OpenDR project1 is focused on developing a modular,
open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning to provide
advanced perception and cognition capabilities, meeting in this way the general requirements of robotics
applications in various applications areas, such as healthcare, agri-food, and agile production. To this
end, OpenDR is developing state-of-the-art lightweight and high resolution-enabled deep learning methods
for core robotic functionalities, while investigating ways to integrate perception and action through
active perception approaches.
The FOCETA project2 is focused on the problems associated with the
analysis of the systems’ safety, security and performance in complex
and often unpredictable environments given the fact that deep learning
components are particularly sensitive to cyber-security threats and
possible deviations from the system’s operational design domain. In
addition to having continuously evolving requirements, we also need to
support updates in the learning components and continuous
testing/verification of the system under design. FOCETA invests in
state-of-the-art formal methods for the continuous verification and
validation of the systems, as well as for their deep learning components.
The summer school will host invited talks by distinguished researchers
and industrial experts, as well as talks by the project participants that
will reflect the achievements in the two ongoing projects.
📢 News:
On Friday October 7th, during the hands-on workshops, you are encouraged
to bring your own laptops in order to actively participate, although it is not required
for attendance. The tutorials will be given via Google Colab so a google account
is needed. Temporary WiFi access will be given to those of you who need it.
Guided tour in Thessaloniki city center (Wednesday at 17:40) [Meeting point: Arch
of Galerius]
Participants who will attend at least 80% of the talks will
receive a 𝗰𝗲𝗿𝘁𝗶𝗳𝗶𝗰𝗮𝘁𝗲 𝗼𝗳 𝗮𝘁𝘁𝗲𝗻𝗱𝗮𝗻𝗰𝗲 !
Organizing Committee:
Name
Email
Nikos Passalis (OpenDR)
passalis@csd.auth.gr
Nikos Kekatos (FOCETA)
nkekatos@csd.auth.gr
Paraskevi Nousi (OpenDR)
paranous@csd.auth.gr
Anastasios Temperekidis (Website)
anastemp@csd.auth.gr
Continuous Engineering and Deep Learning for Trustworthy Autonomous Systems
Lecturers:
Adam Molin is technical manager in Corporate R&D at
Denso Germany. He is responsible
for R&D of simulation-based verification and validation methods for AD/ADAS applications.
Prior to that, he was a postdoctoral researcher at the Department of Automatic Control, Royal
Institute of Technology (KTH), Stockholm, Sweden, from 2014 to 2016. He received his Diplom degree in
electrical engineering in 2007 and his Doctor of Engineering degree in 2014, both from the Department
of Electrical Engineering and Information Technology, Technical University of Munich (TUM), Germany.
His Ph.D. thesis was awarded with the Kurt-Fischer-Prize by the Department of Electrical Engineering
and Information Technology, TUM, in 2014.
Ezio Bartocci is currently a full professor for
Formal Methods in Cyber-Physical
Systems Engineering at the Faculty of Computer Science TU Wien where he is leading the Trustworthy
Cyber-Physical Systems (TrustCPS) Group. The primary focus of his research is to develop formal
methods, computational tools and techniques that support the modeling and the automated analysis of
complex computational systems, including software systems, cyber-physical systems and biological
systems. He has published more than 100 articles and papers in top journals and conferences (e.g.,
ICSE, CAV, TACAS, EMSOFT, etc.). He is currently the scientific coordinator of the WWTF ICT project
ProbInG, the vice-chair for program admission for the Marie Skłodowska-Curie COFUND Doctoral Programme
LogiCS@TUWien.
Xiaowei Huang is Professor of Computer Science, and
Director of the Trustworthy
Autonomous Cyber-Physical Systems lab, at the University of Liverpool, UK. His research is concerned
with the development of automated verification techniques that ensure the correctness and reliability
of intelligent systems. He is leading the research direction on the verification and validation of
deep neural networks and co-chairing the AAAI and IJCAI workshop series on Artificial Intelligence
Safety. His research has been supported by Dstl (Ministry of Defence, UK), EPSRC, and the EU.
Mohamed AbdElSalam received his B.Sc. and M.S Degree from
Ain-Shams University, Cairo, Egypt, and
Doctor of Information Science and Technology from Osaka University, Osaka, Japan. He joined Mentor
Graphics 1998-2002 working in development of circuit simulation and IC layout tools, and development
of FPGA Advantage/HDS tool, and again in 2008 to 2021, in Global R&D MED solutions as Principal
Engineer, working on hardware emulation targets, Memory softmodels, Virtual Device Solutions and
recently in 2022 as Software Engineering Director for solutions targeting new vertical market segments
for Pre-Silicon Autonomous Verification Environment (PAVE360 Solutions), Cloud Connectivity and ML/AI
applications. He has many publications in the area of real-time systems, HW/SW Co-design and
System Level Modeling.
Son Tong is a senior research engineer at Siemens,
currently project manager and
leading a R&D team of research engineers working on control, autonomous driving and AI engineering
topics. He has been facilitating multiple technology developments at Siemens dealing with ADAS safety,
comfort, and V&V processes. The solutions often involve state of art digital twin simulation and
physical vehicle testing technologies. He was awarded Siemens PL Invention of the Year Award, and in
the finalist of the AutoSens Award 2019 in most influential research. Moreover, his team has received
multiple EU and Belgium research and innovation grants. Son Tong has delivered invited talks in
multiple events (Autosens, JSAE, AV Expo,…) and universities (Oxford, EPFL, Polimi, Univ. Tokyo…). He
also serves in the editorial board of IEEE control systems conferences.
Michael Paulitsch brings 25 years of work
theoretical and applied research and technology work at university and different industries
(aerospace, railway, automotive) in dependability in safety-critical and real-time systems including
security aspects of all types.
Michael fills the role of a Dependability Systems Architect (Principal Engineer) at Intel, Munich,
Germany, as part Intel Labs, since 2018. He pursues Dependable Machine Learning and High-Performance
Systems (resiliency), evaluates and ensures safe and dependable use of neural network models in
safety-critical systems. Focus is platform faults and impact to accelerator technology but also
uncertainty aspects. He also looks at novel safety monitoring approaches at different system levels
(chip, platform, application) for safety-related topics for autonomous systems.
Doron Peled is a computer science Professor at Bar-Ilan
University. His research interests include formal methods, model checking, program synthesis and
runtime verification. He obtained his D.Sc in computer science from the Technion - Israel Institute of
Technology in 1991 under the supervision of Prof. Shmuel Katz and Prof. Amir Pnueli on verification
methods in temporal logic. After a post-doctoral year at the University of Warwick, he joined Bell
Labs, where he worked between 1992 and 2001. He was then appointed as an associated professor at the
University of Texas at Austin and after a year to a professor and chair of software engineering at the
University of Warwick. In 2006 Doron returned to Israel and joined Bar-Ilan University as a professor
of computer science.
Bettina Könighofer is a Senior Researcher at
Lamarr Security Research and Graz University of Technology in Austria. She has been teaching
undergraduate courses since 2012. Her research interests lie in the area of AI especially in
reinforcement learning, formal verification, model checking, and synthesis of hardware and software.
Bettina’s work on shielding was one of the first that combined formal runtime enforcement techniques
with AI, bootstrapping the line of research on shielded learning.
Georgios Fainekos is a Senior Principal
Scientist at Toyota Research Institute of North America (TRINA). He received his Ph.D. in Computer and
Information Science from the University of Pennsylvania in 2008 where he was affiliated with the GRASP
laboratory. He holds a Diploma degree (B.Sc. & M.Sc.) in Mechanical Engineering from the National
Technical University of Athens (NTUA). Among other professional roles, he has been a tenured faculty
at the School of Computing and Augmented Intelligence (SCAI) at Arizona State University (ASU), and a
Postdoctoral Researcher at NEC Laboratories America in the System Analysis & Verification Group. He is
currently working on Cyber-Physical Systems (CPS) and robotics with a focus on Automated Driving
Systems (ADS). His technical expertise is on applied logic, formal verification & requirements,
testing, control theory, artificial intelligence, and optimization. In 2013, Dr. Fainekos received the
NSF CAREER award and the ASU SCIDSE Best Researcher Junior Faculty Award. He has also been recognized
with the top 5% teacher award in 2019 and 2021. His research has received several awards and
nominations (e.g., IEEE CASE 2021, IEEE ITSC 2019, ACM HSCC 2019, IEEE/ACM MEMOCODE 2019), and the
2008 Frank Anger Memorial ACM SIGBED/SIGSOFT Student Award. In 2016, Dr. Fainekos was the program
co-Chair for the ACM International Conference on Hybrid Systems: Computation and Control (HSCC).
Anastasios Tefas received the B.Sc. in
informatics in 1997 and the Ph.D. degree in informatics in 2002, both from the Aristotle University of
Thessaloniki, Greece and since January 2022 he has been a Professor at the Department of Informatics
of the same university. From 2017 until 2021 he was an Associate Professor and from 2008 to 2017 he
was a Lecturer at the Aristotle University of Thessaloniki, as well. From 2006 to 2008, he was an
Assistant Professor at the Department of Information Management, Technological Institute of Kavala.
From 2003 to 2004, he was a temporary lecturer in the Department of Informatics, University of
Thessaloniki. From 1997 to 2002, he was a researcher and teaching assistant in the Department of
Informatics, University of Thessaloniki. Dr. Tefas participated in 20 research projects financed by
national and European funds. He is the Coordinator of the H2020 project OpenDR, “Open Deep Learning
Toolkit for Robotics”. He is Area Editor in Signal Processing: Image Communications journal. He has
co-authored 135 journal papers, 247 papers in international conferences and contributed 8 chapters to
edited books in his area of expertise. Over 6500 citations have been recorded to his publications and
his H-index is 40 according to Google scholar. His current research interests include computational
intelligence, deep learning, pattern recognition, statistical machine learning, digital signal and
image analysis and retrieval and computer vision.
Roel Pieters received his Ph.D degree in Robotics
from Eindhoven University of technology (The Netherlands) in 2013. He is currently an Associate
Professor in robotics and leads the Cognitive Robotics research group. His research interests include
perception, cognition and autonomy for human-robot collaboration, applied in industrial and domestic
setting.
In 2020, Thomas Peyrucain obtained a dual
degree in Mechatronics at ESIGELEC Engineering School (Rouen, France) and a Master in Robotics at
Cranfield University (Cranfield, England). In 2021 he joined PAL Robotics as a Robotics Engineer,
focusing on technical developments especially for the range of EU projects that PAL Robotics is
involved in.
Stefania Pedrazzi received a BSc in Computer
Science and a MSc in Robotics at the ETH Zürich (Switzerland) in 2011. Since 2012 she's working at
Cyberbotics Ltd. contributing with several major improvements to the Webots robot simulator
functionality and developing simulation models in Webots. She also worked at the development of the
robotbenchmark.net web simulation platform and led the technical development in various projects to
create custom Webots simulation scenarios and interfaces for agricultural and industrial applications.
Nikolaos Passalis received the B.Sc. degree in
informatics, the M.Sc. degree in information systems, and the Ph.D. degree in informatics from the
Aristotle University of Thessaloniki, Thessaloniki, Greece, in 2013, 2015, and 2018, respectively.
Since 2019, he has been a post-doctoral researcher with the Aristotle University of Thessaloniki,
while from 2018 to 2019 he also conducted post-doctoral research at the Faculty of Information
Sciences, Tampere University, Finland. He has (co)authored more than 30 journal articles and 45
conference papers. His research interests include deep learning, information retrieval, time-series
analysis and computational intelligence.
Moncef Gabbouj received his MS and PhD degrees in
electrical engineering from Purdue University, in 1986 and 1989, respectively. Dr. Gabbouj is
Professor of Signal Processing at the Department of Computing Sciences, Tampere University, Finland.
His research interests include Big Data analytics, multimedia analysis, artificial intelligence,
machine learning, and pattern recognition.
Charalampos Symeonidis obtained his BsC in
Informatics in 2017 from the Aristotle University of Thessaloniki and he is currently pursuing his PhD
in Computational Intelligence at the Informatics Department of Aristotle University of Thessaloniki.
His research focuses on computer graphics, machine learning and computer vision.
Paraskevi Nousi obtained her B.Sc. and Ph.D.
degree in Informatics from the Aristotle University of Thessaloniki in 2014 and 2021 respectively. She
is currently a post-doctoral researcher in the Artificial Intelligence and Information Analysis
Laboratory in the Department of Informatics at the Aristotle University of Thessaloniki. Her research
interests include deep learning for computer vision, robotics, financial forecasting and gravitational
waves analysis.
Gizem Bozdemir graduated in Economics and
Administrative Science at the University of Selçuk (Turkey) in 2012, and she obtained a master's
degree in Business Administration and Management at ENEB Business School Barcelona in 2022. She
specializes in EU Project Management and Business Development. Gizem has 5 years of experience working
with EU funded projects. She joined PAL Robotics in 2021 as EU Project Coordinator and is dedicated to
coordination of PAL Robotics´s collaborative R&D projects. She is in charge of preparation and
submission of the proposals as well as the coordination of the projects within Horizon Europe and
other EU funding programmes.
Jens Kober is an associate professor at TU Delft,
Netherlands. He is member of the Cognitive Robotics department (CoR), the TU Delft Robotics Institute,
and RoboValley. Jens is the recipient of the Robotics: Science and Systems Early Career Award 2022 and
the IEEE-RAS Early Academic Career Award in Robotics and Automation 2018. His Ph.D. thesis has won the
2013 Georges Giralt PhD Award as the best Robotics PhD thesis in Europe in 2012. Jens was an assistant
professor at TU Delft (2015-2019), first at the Delft Center for Systems and Control (DCSC) and later
at CoR. He worked as a postdoctoral scholar (2012-2014) jointly at the CoR-Lab, Bielefeld University,
Germany and at the Honda Research Institute Europe, Germany. Jens holds degrees (MSc equivalent) in
control engineering from University of Stuttgart and in general engineering from the École Centrale
Paris (ECP). He has been a visiting research student at the Advanced Telecommunication Research (ATR)
Center, Japan and an intern at Disney Research Pittsburgh, USA. Jens is an IEEE Senior Member and
ELLIS Scholar. Jens served as co-chair of the IEEE-RAS TC Robot Learning (2016-2021), as the Virtual
Conference Arrangements Chair for Robotics: Science and Systems 2020, and as a Program Chair for the
Conference on Robot Learning 2020. He currently serves as the Finance Chair for the International
Conference on Advanced Intelligent Mechatronics 2021, as senior editor for the IEEE Robotics and
Automation Letters, as associate editor for the IEEE Transactions on Robotics and for the IEEE/ASME
Transactions on Mechatronics, as editorial board member of the Journal of Machine Learning Research,
as editor for the IEEE/RSJ International Conference on Intelligent Robots and Systems, as well as area
chair/associate editor for numerous conferences. He has served as reviewer for most well-known
journals and conferences in the fields of machine learning and robotics. From 2007-2012 he was working
with Jan Peters as a master's student and subsequently as a Ph.D. student at the Robot Learning Lab,
Max-Planck Institute for Intelligent Systems, Empirical Inference Department (formerly part of the MPI
for Biological Cybernetics) and Autonomous Motion Department. Jens has graduated in Spring 2012 with a
Doctor of Engineering “summa cum laude” from the Intelligent Autonomous Systems Group, Technische
Universität Darmstadt.
Alexandros Iosifidis is a Professor at Aarhus
University, Denmark. He leads the Machine Learning & Computational Intelligence group at the
Department of Electrical and Computer Engineering, and the Machine Intelligence research area of the
University's Centre for Digitalisation, Big Data and Data Analytics (DIGIT). He has contributed to
more than thirty R&D projects financed by EU, Finnish, and Danish funding agencies and companies. He
has co-authored more than 235 papers in in international journals/conferences/workshops in topics of
his expertise. He is a co-Editor of the Deep Learning for Robot Perception and Cognition book
(Academic Press, 2022). Alexandros is the Associate Editor in Chief (for neural networks) of the
Neurocomputing journal, and an Associate Editor of IEEE Transactions on Neural Networks and Learning
Systems, and of Image Communication journal. He contributed to the organization of international
conferences , as an Area Chair or Technical Program Committee Chair, including IEEE ICIP (2018-2022)
and EUSIPCO (2019,2021), and as Publicity co-Chair for IEEE ICME 2021. His work received several
awards, including the Academy of Finland Postdoctoral Research Fellowship 2016, the H.C. Ørsted Young
Researcher Prize 2018 for contributions to Signal Processing and Machine Learning, the EURASIP Early
Career Award 2021 for contributions to Statistical Machine Learning and Artificial Neural Networks,
the JP Morgan Faculty Research Award 2022 for work in Bayesian Deep Learning for Financial
forecasting, and he is a Senior Member of the Institute of Electrical and Electronics Engineers
(IEEE). His research interests include statistical machine learning and deep learning finding
applications in problems coming from comptuer/robot vision, ecology and finance.
Erdal Kayacan received a B.Sc. degree in electrical
engineering from Istanbul Technical University, Istanbul, Turkey, in 2003 and a M.Sc. degree in
systems and control engineering from Bogazici University, Istanbul, Turkey, in 2006. In September
2011, he received a Ph.D degree in electrical and electronic engineering at Bogazici University,
Istanbul, Turkey. After finishing his post-doctoral research in KU Leuven at the division of
mechatronics, biostatistics and sensors (MeBioS) in 2014, he worked in Nanyang Technological
University at the School of Mechanical and Aerospace Engineering as an assistant professor for four
years. Currently, he is pursuing his research in Aarhus University at the Department of Engineering as
an associate professor. Dr. Kayacan is co-writer of a course book “Fuzzy Neural Networks for Real Time
Control Applications, 1st Edition Concepts, Modeling and Algorithms for Fast Learning“,
Butterworth-Heinemann, Print Book ISBN:9780128026878. (17 Sept 2015). He is a Senior Member of
Institute of Electrical and Electronics Engineers (IEEE). From 1st Jan 2017, he is an Associate Editor
of IEEE Transactions on Fuzzy Systems. His research areas are computational intelligence methods,
sliding mode control, model predictive control, mechatronics and unmanned aerial vehicles.
Nikos Nikolaidis received the Diploma of
Electrical Engineering and the Ph.D. degree in Electrical Engineering from the Aristotle University of
Thessaloniki, Thessaloniki, Greece, in 1991 and 1997, respectively. He is currently Associate
Professor at the Department of Informatics, Aristotle University of Thessaloniki. He has coauthored 1
book, 15 book chapters, 61 journal papers and 189 conference papers and co-edited one book and two
special issues in journals. Moreover he has co-organized 6 special sessions in international
conferences. The number of citations to his work by third authors exceeds 6600 (h-index 35, Source:
Google Scholar). He has participated into 25 research projects funded by mainly by EU but also
national funds. His current areas of interest include computer/robot vision, image/video processing
and analysis, analysis of motion capture data, computer graphics and visualization. Dr. Nikolaidis is
currently serving as associate/area editor for Signal Processing: Image Communication and EURASIP
Journal on Image and Video Processing. He served as Technical Program chair of IEEE IVMSP 2013
workshop, and Publicity co-chair of EUSIPCO 2015 and IEEE ICIP 2018. Dr. Nikolaidis is a Senior Member
of IEEE.
Jenni Raitoharju received her PhD in Information
Technology from Tampere University of Technology in 2017. She is an Assistant Professor of Signal
Processing at University of Jyväskylä, Finland and a Senior Research Scientist at the Finnish
Environment Institute, Finland. Her research interests include machine learning and pattern
recognition methods along with applications in biomonitoring and autonomous systems.
Daniel Honerkamp obtained his BA Economics from
the Universiy of Zurich in 2016 and graduated from the MSc Computational Statistics And Machine
Learning (CSML) from University College London in 2018. He continued on to work at the intersection of
distributed systems, mechanism design and intelligent agents at Fetch.AI, Cambridge where he developed
consensus protocols and incentive mechanisms for autonomous economic agents. He is currently a PhD
student in the Robot Learning Lab at the University of Freiburg, where his research focuses on mobile
manipulation and embodied AI to develop autonomous robotic agents for the real world.
Abhinav Valada -
Alea Scovill --
Continuous Engineering and Deep Learning for Trustworthy Autonomous Systems
Program:
Time
Monday Oct 3rd
Tuesday Oct 4th
Wednesday Oct 5th
Thursday Oct 6th
Friday Oct 7th
09:00-09:45
Deep Learning I: MLPs, CNNs (AUTH, A. Tefas)
DL for Object Detection/Tracking 3D (AU, A. Iosifidis)
Continuous Engineering of Trustworthy Autonomy (UGA, S. Bensalem)
Moment-based Analysis of Probabilistic Programs (TU Wien, E.Bartocci)
Hierarchical Potential-based Reward Shaping from Specifications (AIT, Dejan Ničković)
09:45-10:30
Deep Learning II: RNNs, Transformers (AU, A. Iosifidis)
Towards Autonomous Environmental Monitoring (J. Raitoharju)
Digital Twin Autonomous Vehicle Testing and Validation:
Automated Valet Parking Use Case (Siemens Digital Industries Software, S. Tong)
EAGERx hands-on session (TUD, Bas van der Heijden & Jelle Luijkx). [TUTORIALS]
10:30-11:00
Coffee break
Coffee break
Coffee break
Coffee break
Coffee break
11:00-11:45
Deep Learning III: RL and Deep Reinforcement Learning (TUD,
Jens Kober)
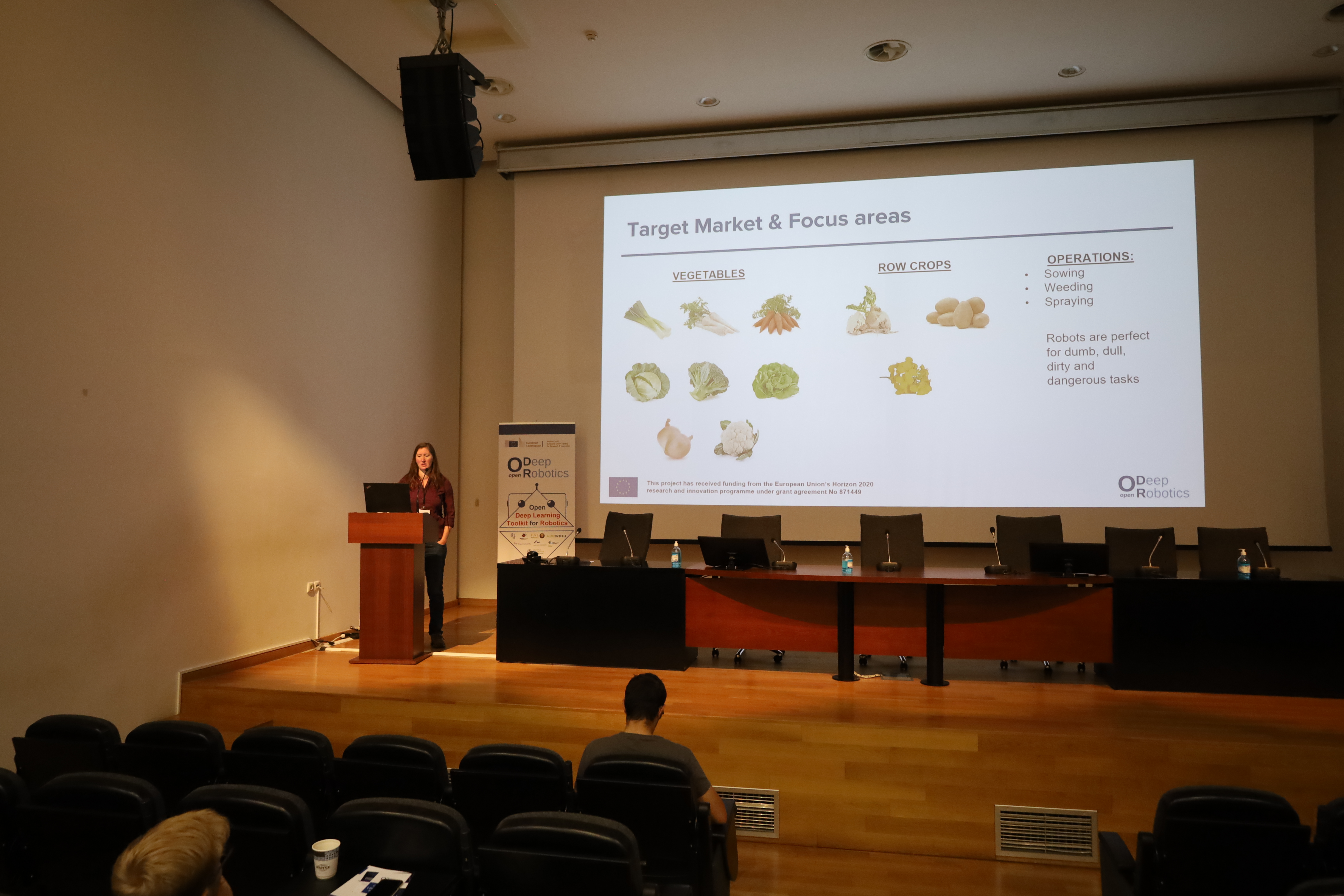
DL for Agriculture (AGI, Alea Scovill)
Is Deep Learning Certifiable at all? (ULIV, X. Huang)
In search of Automated Driving Systems Safety through Formal
Requirements (Toyota N. America, G. Fainekos)
Shield Synthesis with TEMPEST (TU Graz, F. Cano)
11:45-12:15
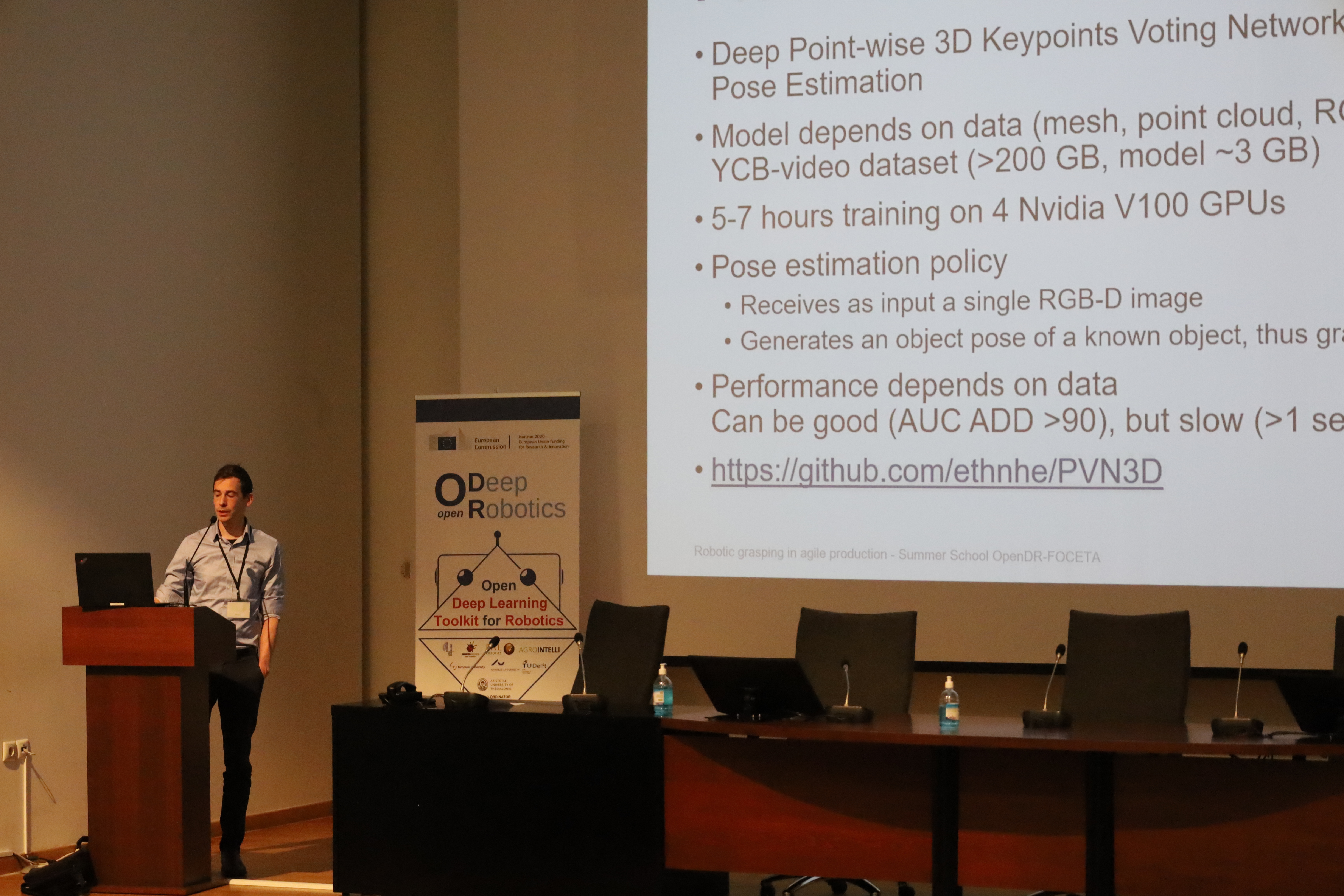
Robotic Grasping for Agile Production (TAU, R. Pieters)
Digital Twin Demos (Dr. Mohamed AbdElSalam, Siemens EDA, Egypt)
12:15-12:30
OpenDR Toolkit Overview (AUTH, N. Passalis)
12:30-13:45
Lunch
Lunch
Lunch
Lunch
Lunch
13:45-14:30
DL for Semantic Segmentation (ALU-FR, Abhinav Valada)
Robotic Simulation Environments (AUTH, N. Nikolaidis, Charalampos
Symeonidis)
DNN Robustness and Resiliency Approaches (Intel Germany, M. Paulitsch)
Control Synthesis using Deep Learning (Bar-Ilan Un., D. Peled)
OpenDR toolkit hands-on workshop
14:30-15:15
Learning for Mobile Manipulation (ALU-FR, Daniel Honerkamp)
Webots: robotics simulation on the cloud (CYB, S. Pedrazzi)
Formal Methods for Safe and Accountable AI (TU Graz, B. Konighofer)
15:15-15:45
Coffee break
Coffee break
Coffee break
Coffee break
Coffee break
15:45-16:30
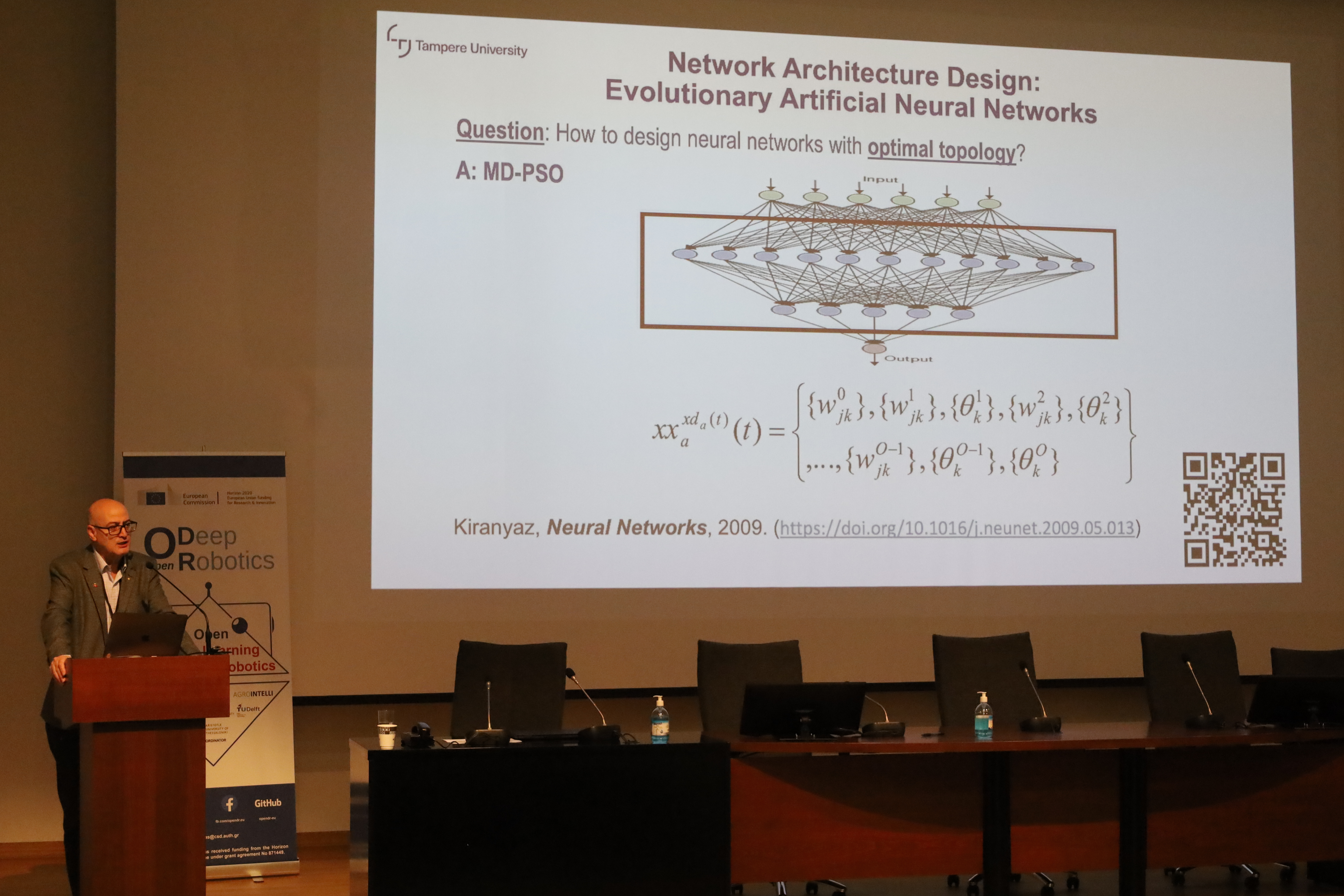
Deep Learning for Biosignals (TAU, M. Gabbouj)
DL for robot navigation and planning using
neuromorphic vision (AU, Erdal Kayacan)
Formal Methods for Safe and Accountable AI (TU Graz, B. Konighofer)
[Contd.]
Digital Twin Interconnect: Introduction to Transaction-level Modeling and
Functional Mock-up Interface (Siemens EDA Egypt, M. AbdElSalam)
OpenDR toolkit hands-on workshop
16:30-17:15
DL for Object Detection/Tracking 2D (AUTH, V. Nousi)
Healthcare/Assistive Robotics (PAL,
Gizem Bozdemir and Thomas Peyrucain)
Scenario-based Testing for Automated Driving (Denso Germany, A. Molin)
OpenDRIVE and OpenSCENARIO introduction and its application in Simcenter
Prescan (Siemens Industry Software Netherlands, T. Singh)
Guided tour in Thessaloniki city center [Meeting point: Arch
of Galerius]
[17:15-18:00]Open discussion and miscellaneous demonstrations
Monday October 3rd
Introductory lecture to Deep Learning, covering Multilayer Perceptron-like architectures as well as
Convolutional Neural Networks.
Analysis of sequential data (e.g., time-series, image sequences) requires the underlying
machine/deep learning models to be able encode temporal information and encode temporal dynamics.
This cannot be efficiently done by using the standard neural network types (multilayer Perceptrons).
In this lecture we will introduce two types of deep learning models that can efficiently model
temporal dynamics following two different approaches. We will start by describing the basics of
Recurrent Neural Networks (RNNs) which are designed to operate on sequential data, and we will
proceed to describe more sophisticated neural network types addressing some of the limitations of
RNNs, i.e., the Long- Short-Term Memory (LSTM) networks. We will also describe a modern neural
network type which exploits the idea of self-attention in order to model the dependencies between
items in its inputs called Transformers. Transformers are currently the state-of-the-art solution
for many problems in computer/robot vision, and in particular their variant called Visual
Transformers (ViTs).
-
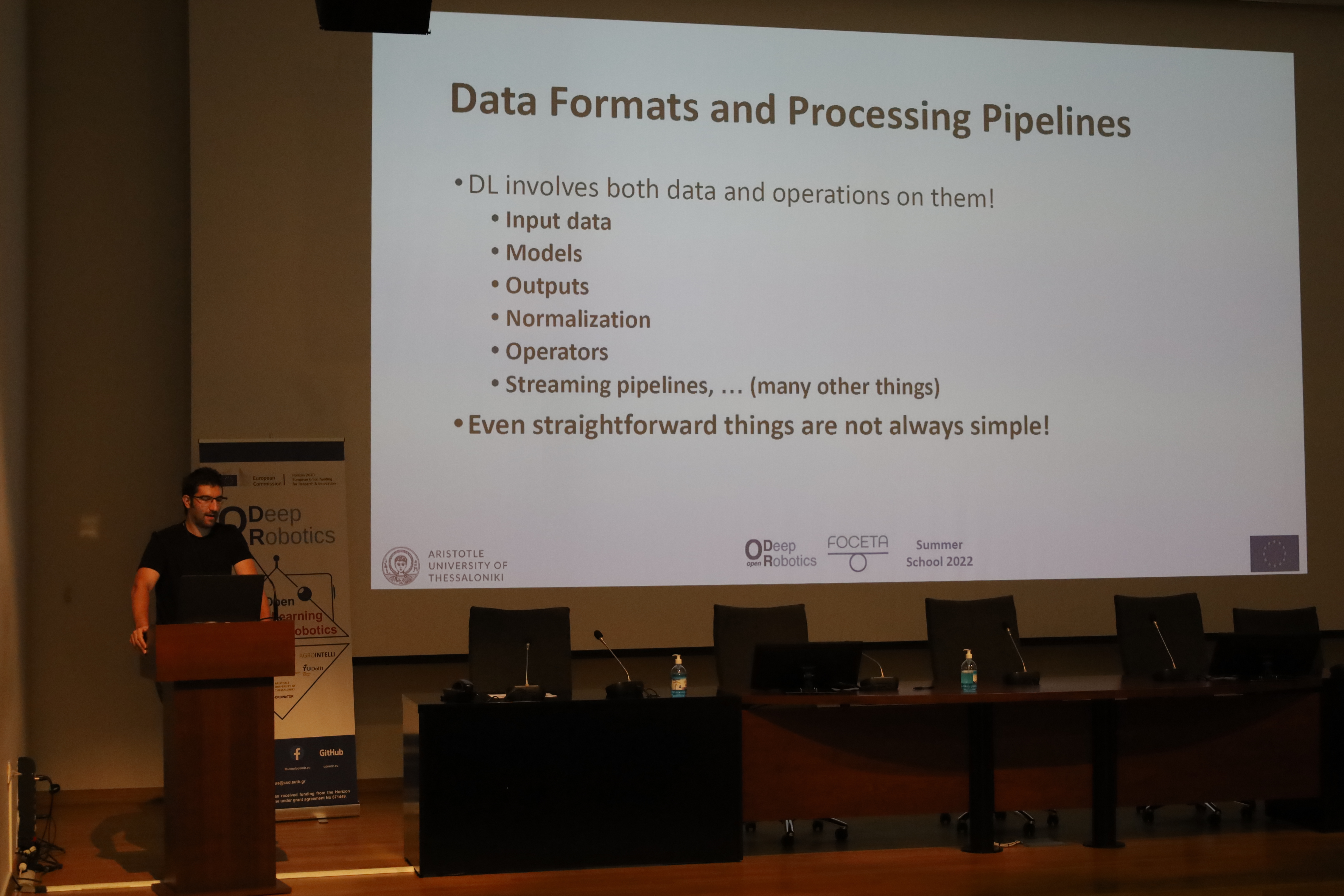
Introducing the OpenDR project and toolkit, which will be further explored in the hands-on
workshops.
Mobile manipulation remains a critical challenge across both service and industrial settings and is
a key component to visions such as household assistants. But for this it requires the combination of
a wide range of capabilities, such as perception and exploration in unknown environments while
controlling large, continuous action spaces for simultaneous navigation and manipulation.
In this talk I will first provide an overview of the main challenges and current benchmarks. I will
then summarize and walk through the pipelines of current state-of-the-art approaches with a focus on
both the high-level task learning and the low-level motion execution on robotic agents. Lastly, I
will discuss potential paths forward and ways to integrate these low- and high-level components.
--
Deep Learning methods overview for object detection in images and object tracking in videos. Seminal
works after DL's advent, state-of-the-art methods and future horizons.
Tuesday Oct 4th
While detection and tracking of objects in visual data (i.e., images and videos) has seen a lot of
attention due to the wide availability of cameras and their use in multiple applications, objects in
the real world and relationships among them are better described in 3D. While 3D sensors (like
Lidars) are more expensive compared to high-end cameras and they are not widely available, there are
applications in which they have received a lot of attention, like autonomous vehicles. In this
lecture, we will describe the problems of 3D object detection and tracking, their challenges, and a
number of recently proposed methodologies.
Decline of natural habitats and species continues worldwide due to various threats ranging from
pollution and urbanization to intensive land use and climate change. If the problems are not
addressed, this will have serious impacts on biodiversity and the vital services it provides. The
urgent need for action has been recognized in international and national strategies that aim at
reversing the degradations of ecosystems. Achieving these goals requires good understanding of
natural ecosystems and their ongoing changes, but laborious manual monitoring cannot provide enough
information. Machine learning has a lot of potential to assist in efficiently gathering information
via modern large-scale autonomous environmental monitoring approaches to better understand and
mitigate the negative impacts. This lecture will cover selected environmental monitoring tasks,
introducing special challenges in these tasks and proposed deep learning-based solutions towards
autonomous monitoring.
--
Recent developments in robotics and deep learning have enabled high-level robotic tasks to be
learned from simulated or real data. In this talk, the task of robot grasping is covered, where a
robot manipulator learns a grasping model from perceptual data, such as RGB-D or point clouds.
Grasping is presented in context of robotics for agile production, thereby providing requirements
and limitations that are relevant for deep learning in robotics. An overview of different approaches
is given with special attention to the evaluation of robotic object grasping and the potential
follow-step of object manipulation.
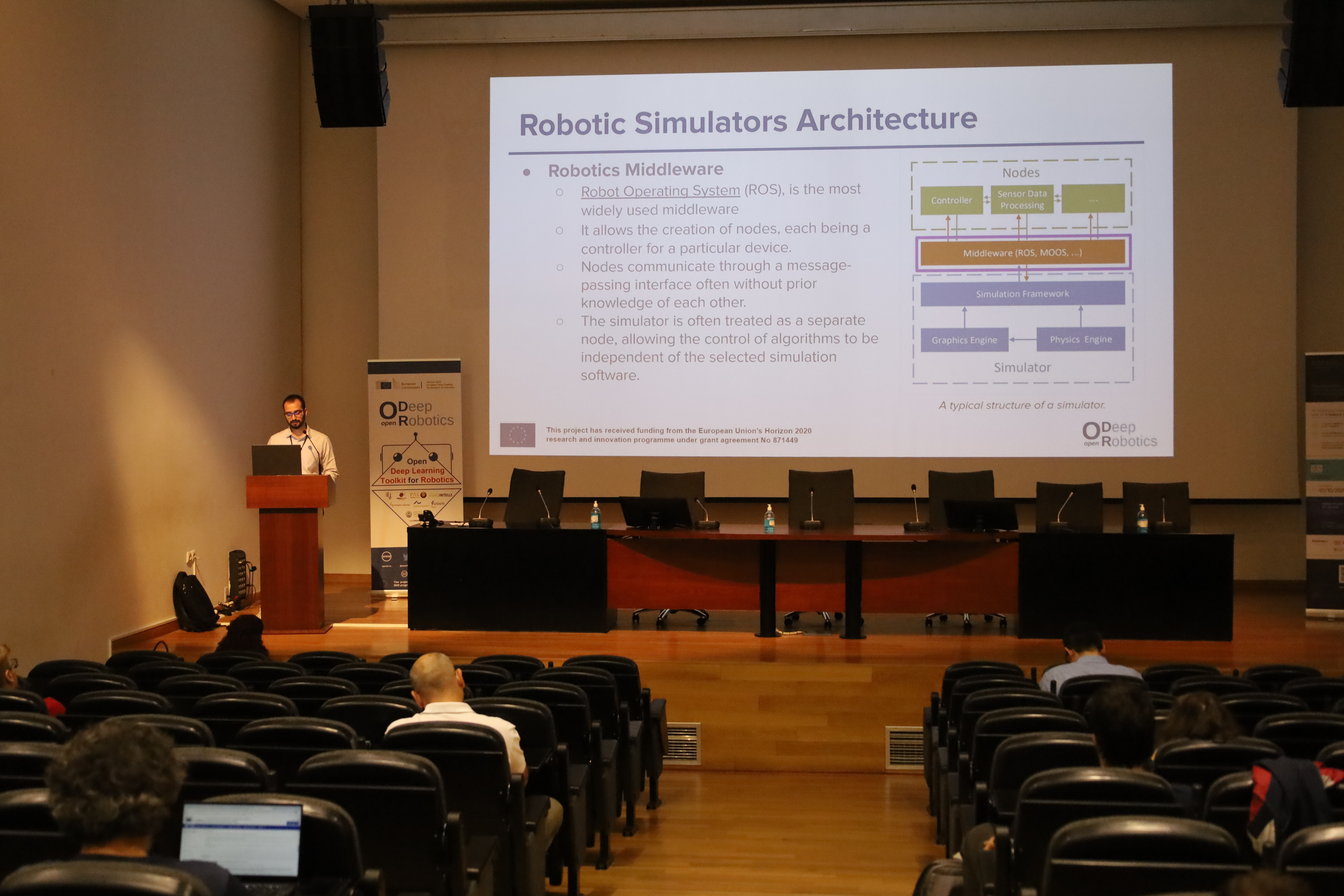
Simulation environments have always been a vital part of robotics research, providing tools for
modelling and testing novel concepts and algorithms. The aim of this presentation is to introduce
its audience to the main components of modern robotic simulators, as well as to the types of
simulations established by the robotics community over the years. A wide range of robotic simulators
will be reviewed, highlighting the pros and cons of each. Finally, applications of these simulators
in robotics research, including those related to deep learning willl be presented.
Publishing and sharing simulation research results may require complex setup instructions and heavy
dependencies installation. Webots eases this task with integrated functionalities to publish
simulations on the web that can be viewed by reviewers and fellow researches in just few clicks. In
this talk we will first provide a general overview of the Webots robotics simulation software and
then focus on the 'webots.cloud' open-source webservice to share simulations online.
--
Robotics for healthcare applications, showcasing real world examples from the projects that PAL is
involved in, including OpenDR. Presenting developments and pilots that PAL has been carrying out in
the healthcare sector.
Wednesday Oct 5th
---
We will discuss some Siemens engineering solutions for ADAS and AV validation that combines
simulation,
physical testing and algorithms with focus on automated valet parking. The testing framework starts
with
real driving data, where baseline relevant and critical scenarios are extracted using safety and
comfort
requirements. These scenarios are then reconstructed into a digital twin environment with
high-fidelity
simulation models of vehicle dynamics, sensors and traffic, allowing further scenario generation for
massive testing. The algorithms development of vehicle perception, SLAM, parking planning and
control
will also be discussed. Finally, we will show some testing results on simulation, physical vehicle
(Siemens Simrod) and shadow testing using executable digital twin (xDT).
Deep Learning has been widely applied to many industrial applications but was also discovered
various
safety and security risks. The risks have led to not only the trustworthiness concerns but also
intensive research in the past few years on how to determine if a deep learning model is safe in a
rigorous way. This talk will briefly review existing efforts on certifying the safety of deep
learning
models, including methods based on formal verification, software testing, and reliability
assessment. In
addition to the technical review, we will also present a case study – based on an underwater vehicle
--
on which we exercise the certification techniques. Finally, we will discuss theoretical and
practical
limitations of the certification techniques on deep learning models.
Use of Neural Networks in safety-critical systems like autonomous driving, robotics, or smart city
applications requires robustness and resiliency to certain types of faults. Classification and
object
detection networks in such applications are widely used and accepted. While metrics and approaches
to
optimization of DNNs are well accepted and deployed in machine learning community, evaluation of
object
detection metrics caused by platform errors has not yet been widely performed. This talk will
present
common metrics and its performance in case of platform faults. Typically, neural networks
(especially
DNNs) are thought to be robust against hardware faults. Yet, in certain scenarios, faults could
systematically impact system-level decisions in unforeseen ways. We will present such scenarios and
simple effective mitigation techniques. Additionally, we will speculate how such approaches can find
their way into applications of deployment of DNNs in safety-critical systems.
The enormous influence of systems deploying artificial intelligence, is contrasted by the growing
concerns about their safety and the relative lack of trust by the society. To enable the broader
deployment of AI-based systems, we need new methods to guarantee safety as well as to address the
questions of explainability, predictability and accountability of the decision-making process of
AI-based systems. Within this lecture, we will consider safety and accountability of AI from a
formal
methods perspective. We will discuss some ideas on how to tackle these challenges using formal
methods,
with a special focus on using correct-by-construction run-time enforcers called shields. In an
interactive manner, we will discuss basic concepts of game theory and model checking to construct
such
shields and discuss their applications in several reinforcement learning settings. Additionally, we
will
touch upon the topic of formal modelling and analysis techniques for assessment of intention and
responsibility of AI-based systems.
Proving the safe operation of autonomous driving and advanced driver assistance systems is one of
the
biggest challenges that the automotive domain is currently facing. Purely conventional test methods
would fail by far due to the vast amount of test kilometers that are needed to argue about system
safety
guarantees. Scenario-based testing is a promising and widely studied method in order to address this
challenge.
In this talk, we will discuss why scenario-based testing can deliver an important brick for the
safety
argumentation of highly automated vehicles. Our argumentation will refer to requirements from recent
safety standards such as ISO 21448 (SOTIF) or ISO 5083 (SaFAD), and will introduce the different
testing
strategies: coverage-driven testing, edge-case-testing, and expert-knowledge-testing. For several of
these strategies candidate methods will be proposed, such as optimization-based critical scenario
identification, and we will discuss open challenges, e.g., the derivation of suitable and modular
scenario description languages. The talk will contain illustrative examples developed within our
team to
underline and demonstrate the problem setting.
Thursday Oct 6th
Probabilistic programs (PPs), originally employed in cryptographic/privacy protocols and randomized
algorithms, are now gaining momentum due to the several emerging applications in the areas of
machine
learning and AI. Probabilistic programming languages include native constructs for sampling
distributions allowing to freely mix deterministic and stochastic elements. The resulting flexible
framework comes at the price of programs with behaviors hard to analyze, leading to unpredictable
adverse consequences in safety-critical applications. One of the main challenges in the analysis of
these programs is to compute invariant properties that summarize loop behaviors. Despite recent
results,
full automation of invariant generation is at its infancy and only targets expected values of the
program variables, which is insufficient to recover the full probabilistic program behavior. In this
talk, we present some of the results of our project ProbInG that aims at developing novel and fully
automated approaches to generate invariants over higher-order moments and the value distribution of
program variables, without any user guidance.
As the hype around the imminent mass deployment of fully Automated Driving Systems (ADS) on public
roads
recedes, industry and government agencies are facing the challenge of how to assess and certify
safety
of ADS. The problem is challenging primarily due to the unpredictable nature of driving on open
public
roads. If anything can happen at any time, then what are you supposed to test and assure against? We
argue that testing ADS must be driven by requirements. Requirements must capture not only the
minimum
desired performance of system components as part of the ADS performance, but also system level
performance, e.g., compliance with traffic rules and regulations. In this presentation, we provide
an
overview of how such requirements can be formalized in temporal logics. Then, we demonstrate how
these
requirements can be used for monitoring as well as for search-based testing in ADS. In addition, we
introduce a new temporal logic specifically designed for perception systems. Our ADS requirements
driven
test generation framework Sim-ATAV based on S-TaLiRo and Webots is open source and publicly
available.
Deep learning has gained unprecedented rapid popularity in computer science in recent years. It is
used
in tasks that were previously considered highly challenging for computers, such as speech and image
recognition and natural language processing. While deep learning is often associated with
complicated
tasks, we look at the much more mundane task of refining a system behavior through control that is
constructed with the use of learning techniques. We compare the use of deep learning for this task
with
other techniques such as automata learning and genetic programming.
Designing today’s smart, connected products is challenging. Engineers developing mechanical
hardware,
electronics, and software components must coordinate their work, so it all fits seamlessly together.
Digital twins can deliver value here by bridging these components, ensuring superior collaboration,
and
speeding up the digital transformation implementation. In this lecture, we introduce two
well-established industrial standards that can be used in building interconnect fabric for digital
twins
and demonstrate their interoperability with industrial case-studies: TLM (Transaction Level
Modelling)
standard which is a well-established standard in the EDA industry. It is already baked into two key
IEEE
standards which are key to most simulation use models in the industry, namely the IEEE 1800
SystemVerilog standard and the IEEE 1666 SystemC standard and FMI (Functional Mock-up Interface)
which
is a tool independent standard to support model exchange, scheduled execution and co-simulation of
dynamic models.
OpenDrive and OpenScenario standards are becoming increasingly important in the development and
testing
of autonomous vehicles. The OpenDrive standard is used for road network description, whereas
OpenScenario describes the behavior of road users in a scenario. The standardization of such data
enables reuse of data across industry partners, as well as co-simulation of multiple tools. The
standards also empower regulatory bodies and government authorities, together with industry
partners, to
create unambiguous scenario libraries for the testing and safety-certification of autonomous
vehicles.
This workshop presents the support for OpenDrive and OpenScenario standards in the autonomous
vehicle
simulation platform, Simcenter Prescan. We demonstrate how a virtual validation workflow in
Simcenter
Prescan is defined based on OpenDrive and OpenScenario data.
Friday Oct 7th
The automatic synthesis of policies for robotic-control tasks through reinforcement learning relies
on a reward signal that simultaneously captures many possibly conflicting requirements.
In this paper, we introduce a novel, hierarchical, potential-based reward-shaping approach (HPRS)
for defining effective, multivariate rewards for a large family of such control tasks. We formalize
a task as a partially-ordered set of safety, target, and comfort requirements, and define an
automated methodology to enforce a natural order among requirements and shape the associated reward.
Building upon potential-based reward shaping, we show that HPRS preserves policy optimality. Our
experimental evaluation demonstrates HPRS's superior ability in capturing the intended behavior,
resulting in task-satisfying policies with improved comfort, and converging to optimal behavior
faster than other state-of-the-art approaches. We demonstrate the practical usability of HPRS on
several robotics applications and the smooth sim2real transition on two autonomous-driving scenarios
for F1TENTH race cars.
Registration:
Attendance of the summer school is in person and it is restricted to registered participants. There is no
registration fee, but since there are only a limited number of spaces available, participation in the
summer school is subject to approval by the organisers. Applicants have to submit their applications as
soon as possible, using the form below. The names of the person who can provide a reference (preferably
advisors, professors, or
senior colleagues) have to be included.
Venue: Aristotle University Research Dissemination Center
The building is located downtown, on Tritis Septemvriou Str. at Aristotle University’s campus between the
Student Club and the University Gymnasium.
The KEDEA building is connected
with the following bus lines:
2, 7, 14, 58 Bus Stop University of Macedonia 17, 24, 37 Bus Stop Fititiki Leschi
10,31 Bus Stop Agia Foteini- University of Macedonia
27,28,83 Τerma Grammis
HOTEL ABC (3*)- THESSALONIKI—ideally located in the city centre, close to all major attractions, 100
rooms, Café-Bar, Restaurant.
SPECIAL EVENT CODE: OpenDR-FOCETA
ROOM TYPE
NUMBER OF ROOMS
SPECIAL RATE INCLUDING BUFFET BREAKFAST
Single
15
59€
Twin
5
76€
***** Rates per room & per night with breakfast LUNCH OR DINNER:
A la carte menu available
Lunch: 12:00-16:30 , Dinner: 20:00-22:30
TAXES: Rates include VAT & Municipality tax
** Stay over tax 1,5 € / room/ night is NOT included – Settled by guest upon arrival---A separate
invoice will be issued IMPORTANT NOTICE: Special rates are NOT available through travel agencies, OTAs (booking.com, expedia
etc) or any other intermediate. BOOKING CONFIRMATION -GUARANTEE:
Participants can contact our Reservations Desk by e-mail: info@hotelabc.gr . Please indicate the special
event code as well as your arrival / departure dates & type of room you wish to book.
A deposit is required to confirm the booking. The participants will receive a link to their email
address, transfering them to a 3d SECURE bank page, to enter their credit card details and settle the
deposit due (1 night deposit).
Please confirm your bookings until 20/08/2022.
Bookings requested after the 20th of August, will be reconfirmed depending on availability.
Full payment is required upon departure.
It will be a pleasure welcoming all the participants to Thessaloniki.
Feel free to contact us for any further information you may require.
Arrival Date : 02 OCTOBER 2022 (or earlier upon availability)
Departure Date : 08 OCTOBER 2022 (or later upon availability)
Event Code : FOCETA SUMMER SCHOOL
ROOM TYPE
ROOM RATE
Single room (double bed, 14 sq.m.)
85,00 € (per night)
Double Room Interior View (double bed, 16 sq.m.) or Twin room with balcony (Twin single beds, 18
sq.m.)
95,00 € (per night)
***** Above rates include Breakfast in buffet , service and Taxes Check in from 15.00 & Check out until 11.00
Our rooms and suites feauture all modern amenities and technology and:
Free WiFi access
Fully renovated rooms
32” Flat TV
Other amenities and services:
Use of Wellness Fitness Center (open 12.00-22.00) with € 5,00 special rate (1 hour / 1 person / day)
for Single, Double & Twin rooms
Free Use of Wellness Fitness Center (open 12.00-22.00) for Superior Double, Junior & Deluxe Suites
(1 hour / person /day)
Room Service
Nearby garages with extra daily rate of 12-15 €
Guarantee:
For guarantee of your booking, is required the cost of the first night, within five days from the day of
the confirmation. The payment can be done by credit card.
Payment policy:
Full settlement of your account will be made on spot.
Cancellation Policy:
Reservation may be cancelled 20 days before arrival without charges. For reservations cancelled 19 or
less days before arrival the deposit amount will be charged.
Deposits cannot be refunded, they can be used for a new reservation within 6 months.
Early departures will be charged with the entire amount. No-shows will be charged the total amount of
stay.
Arrival Date : 02 OCTOBER 2022 (or earlier upon availability)
Departure Date : 08 OCTOBER 2022 (or later upon availability)
Event Code : FOCETA SUMMER SCHOOL
ROOM TYPE
ROOM RATE
Single room (single bed, 10 sq.m.)
55,00 € (per night)
Budget Double Room (One double bed, 12 sq.m.)
65,00 € (per night)
Twin room (Two twin beds, 14 sq.m.)
65,00 € (per night)
***** Above rates include Breakfast in buffet, service and Taxes Check in from 15.00 & Check out until 11.00
Our rooms feauture all modern amenities and technology and:
Free WiFi access
Recently renovated rooms
32” Flat TV
All rooms have safe, refrigerator & hair dryer
Other amenities and services:
24h Front Desk
Nearby garage with extra daily rate of 12 €
Guarantee:
For guarantee of your booking, is required the cost of the first night, within five days from the day of
the confirmation. The payment can be done by credit card.
Payment policy:
Full settlement of your account will be made on spot.
Cancellation Policy:
Reservation may be cancelled 20 days before arrival without charges. For reservations cancelled 19 or
less days before arrival the deposit amount will be charged.
Deposits cannot be refunded, they can be used for a new reservation within 6 months.
Early departures will be charged with the entire amount. No-shows will be charged the total amount of
stay.
Arrival Date : 02 OCTOBER 2022
Departure Date : 08 OCTOBER 2022
Number of rooms: Upon availability for single or twin usage with internal or city view)
Event Code : SUMMERSCHOOL22
ROOM TYPE
ROOM RATE
Single room - standard internal view
88,00 € (room per night)
Double room - standard internal view
98,00 € (room per night)
Single room - standard city view
106,00 € (room per night)
Double room - standard city view
118,00 € (room per night)
***** Above rates include taxes except overnight stay tax as well as the following
services:
Breakfast buffet at the Green Bar
Free WiFi internet in all rooms and public areas
Free coffee station for making coffee and tea
1 bottle of water in the room
Free use of the gym
Check in from 15.00 & Check out until 11.00We would like to inform you that we have installed the Blue Air Machine – Ultra Air Purification
System & Disinfecting Filtration System in all common areas of our hotels and conference rooms. In order to use the premises of our hotels, the participants must comply with the instructions of the
EODY regarding the measures to protect against the Covid-19 disease. The overnight stay tax, which is valid from 01/01/18, amounts to €03.00/night/room for four-star
hotels, such as the City Hotel. The customer is obliged to pay the amount corresponding to the agreed
fare upon arrival. The hotel reserves the right to deny the customer stay, in case the customer
refuses to pay the corresponding amount.
Parking
The hotel cooperates with two private parking lots that operate 24 hours a day, every day of the week.
The 1st one is located on Demosthenous Street 6 and is called P24 where the groom can serve by taking
the car. It is located close to the hotel, just 2 minutes by apron.
The daily cost is €20 for a small car and €25 for a larger one (Jeep type). The charge is valid for the
overnight stay until 12:00 pm the following day.
The 2nd is located on 38 Vasileos Herakliou Street and is called Parking Plateia, 7 minutes by foot.
The cost amounts to €15, provided that the customer pays the amount at the cash desk of the parking lot
and takes it himself.
To receive the special price, a stamp of the hotel is given by the reception.
At the entrance of the hotel there is a temporary parking area for check-in and check-out, so that we
can help you with your luggage. special price, stamp of the hotel is given by the reception.
 Adam Molin is technical manager in Corporate R&D at
Denso Germany. He is responsible
for R&D of simulation-based verification and validation methods for AD/ADAS applications.
Prior to that, he was a postdoctoral researcher at the Department of Automatic Control, Royal
Institute of Technology (KTH), Stockholm, Sweden, from 2014 to 2016. He received his Diplom degree in
electrical engineering in 2007 and his Doctor of Engineering degree in 2014, both from the Department
of Electrical Engineering and Information Technology, Technical University of Munich (TUM), Germany.
His Ph.D. thesis was awarded with the Kurt-Fischer-Prize by the Department of Electrical Engineering
and Information Technology, TUM, in 2014.
Adam Molin is technical manager in Corporate R&D at
Denso Germany. He is responsible
for R&D of simulation-based verification and validation methods for AD/ADAS applications.
Prior to that, he was a postdoctoral researcher at the Department of Automatic Control, Royal
Institute of Technology (KTH), Stockholm, Sweden, from 2014 to 2016. He received his Diplom degree in
electrical engineering in 2007 and his Doctor of Engineering degree in 2014, both from the Department
of Electrical Engineering and Information Technology, Technical University of Munich (TUM), Germany.
His Ph.D. thesis was awarded with the Kurt-Fischer-Prize by the Department of Electrical Engineering
and Information Technology, TUM, in 2014.
 Ezio Bartocci is currently a full professor for
Formal Methods in Cyber-Physical
Systems Engineering at the Faculty of Computer Science TU Wien where he is leading the Trustworthy
Cyber-Physical Systems (TrustCPS) Group. The primary focus of his research is to develop formal
methods, computational tools and techniques that support the modeling and the automated analysis of
complex computational systems, including software systems, cyber-physical systems and biological
systems. He has published more than 100 articles and papers in top journals and conferences (e.g.,
ICSE, CAV, TACAS, EMSOFT, etc.). He is currently the scientific coordinator of the WWTF ICT project
ProbInG, the vice-chair for program admission for the Marie Skłodowska-Curie COFUND Doctoral Programme
LogiCS@TUWien.
Ezio Bartocci is currently a full professor for
Formal Methods in Cyber-Physical
Systems Engineering at the Faculty of Computer Science TU Wien where he is leading the Trustworthy
Cyber-Physical Systems (TrustCPS) Group. The primary focus of his research is to develop formal
methods, computational tools and techniques that support the modeling and the automated analysis of
complex computational systems, including software systems, cyber-physical systems and biological
systems. He has published more than 100 articles and papers in top journals and conferences (e.g.,
ICSE, CAV, TACAS, EMSOFT, etc.). He is currently the scientific coordinator of the WWTF ICT project
ProbInG, the vice-chair for program admission for the Marie Skłodowska-Curie COFUND Doctoral Programme
LogiCS@TUWien. Xiaowei Huang is Professor of Computer Science, and
Director of the Trustworthy
Autonomous Cyber-Physical Systems lab, at the University of Liverpool, UK. His research is concerned
with the development of automated verification techniques that ensure the correctness and reliability
of intelligent systems. He is leading the research direction on the verification and validation of
deep neural networks and co-chairing the AAAI and IJCAI workshop series on Artificial Intelligence
Safety. His research has been supported by Dstl (Ministry of Defence, UK), EPSRC, and the EU.
Xiaowei Huang is Professor of Computer Science, and
Director of the Trustworthy
Autonomous Cyber-Physical Systems lab, at the University of Liverpool, UK. His research is concerned
with the development of automated verification techniques that ensure the correctness and reliability
of intelligent systems. He is leading the research direction on the verification and validation of
deep neural networks and co-chairing the AAAI and IJCAI workshop series on Artificial Intelligence
Safety. His research has been supported by Dstl (Ministry of Defence, UK), EPSRC, and the EU. Mohamed AbdElSalam received his B.Sc. and M.S Degree from
Ain-Shams University, Cairo, Egypt, and
Doctor of Information Science and Technology from Osaka University, Osaka, Japan. He joined Mentor
Graphics 1998-2002 working in development of circuit simulation and IC layout tools, and development
of FPGA Advantage/HDS tool, and again in 2008 to 2021, in Global R&D MED solutions as Principal
Engineer, working on hardware emulation targets, Memory softmodels, Virtual Device Solutions and
recently in 2022 as Software Engineering Director for solutions targeting new vertical market segments
for Pre-Silicon Autonomous Verification Environment (PAVE360 Solutions), Cloud Connectivity and ML/AI
applications. He has many publications in the area of real-time systems, HW/SW Co-design and
System Level Modeling.
Mohamed AbdElSalam received his B.Sc. and M.S Degree from
Ain-Shams University, Cairo, Egypt, and
Doctor of Information Science and Technology from Osaka University, Osaka, Japan. He joined Mentor
Graphics 1998-2002 working in development of circuit simulation and IC layout tools, and development
of FPGA Advantage/HDS tool, and again in 2008 to 2021, in Global R&D MED solutions as Principal
Engineer, working on hardware emulation targets, Memory softmodels, Virtual Device Solutions and
recently in 2022 as Software Engineering Director for solutions targeting new vertical market segments
for Pre-Silicon Autonomous Verification Environment (PAVE360 Solutions), Cloud Connectivity and ML/AI
applications. He has many publications in the area of real-time systems, HW/SW Co-design and
System Level Modeling.
 Son Tong is a senior research engineer at Siemens,
currently project manager and
leading a R&D team of research engineers working on control, autonomous driving and AI engineering
topics. He has been facilitating multiple technology developments at Siemens dealing with ADAS safety,
comfort, and V&V processes. The solutions often involve state of art digital twin simulation and
physical vehicle testing technologies. He was awarded Siemens PL Invention of the Year Award, and in
the finalist of the AutoSens Award 2019 in most influential research. Moreover, his team has received
multiple EU and Belgium research and innovation grants. Son Tong has delivered invited talks in
multiple events (Autosens, JSAE, AV Expo,…) and universities (Oxford, EPFL, Polimi, Univ. Tokyo…). He
also serves in the editorial board of IEEE control systems conferences.
Son Tong is a senior research engineer at Siemens,
currently project manager and
leading a R&D team of research engineers working on control, autonomous driving and AI engineering
topics. He has been facilitating multiple technology developments at Siemens dealing with ADAS safety,
comfort, and V&V processes. The solutions often involve state of art digital twin simulation and
physical vehicle testing technologies. He was awarded Siemens PL Invention of the Year Award, and in
the finalist of the AutoSens Award 2019 in most influential research. Moreover, his team has received
multiple EU and Belgium research and innovation grants. Son Tong has delivered invited talks in
multiple events (Autosens, JSAE, AV Expo,…) and universities (Oxford, EPFL, Polimi, Univ. Tokyo…). He
also serves in the editorial board of IEEE control systems conferences. Michael Paulitsch brings 25 years of work
theoretical and applied research and technology work at university and different industries
(aerospace, railway, automotive) in dependability in safety-critical and real-time systems including
security aspects of all types.
Michael fills the role of a Dependability Systems Architect (Principal Engineer) at Intel, Munich,
Germany, as part Intel Labs, since 2018. He pursues Dependable Machine Learning and High-Performance
Systems (resiliency), evaluates and ensures safe and dependable use of neural network models in
safety-critical systems. Focus is platform faults and impact to accelerator technology but also
uncertainty aspects. He also looks at novel safety monitoring approaches at different system levels
(chip, platform, application) for safety-related topics for autonomous systems.
Michael Paulitsch brings 25 years of work
theoretical and applied research and technology work at university and different industries
(aerospace, railway, automotive) in dependability in safety-critical and real-time systems including
security aspects of all types.
Michael fills the role of a Dependability Systems Architect (Principal Engineer) at Intel, Munich,
Germany, as part Intel Labs, since 2018. He pursues Dependable Machine Learning and High-Performance
Systems (resiliency), evaluates and ensures safe and dependable use of neural network models in
safety-critical systems. Focus is platform faults and impact to accelerator technology but also
uncertainty aspects. He also looks at novel safety monitoring approaches at different system levels
(chip, platform, application) for safety-related topics for autonomous systems. Doron Peled is a computer science Professor at Bar-Ilan
University. His research interests include formal methods, model checking, program synthesis and
runtime verification. He obtained his D.Sc in computer science from the Technion - Israel Institute of
Technology in 1991 under the supervision of Prof. Shmuel Katz and Prof. Amir Pnueli on verification
methods in temporal logic. After a post-doctoral year at the University of Warwick, he joined Bell
Labs, where he worked between 1992 and 2001. He was then appointed as an associated professor at the
University of Texas at Austin and after a year to a professor and chair of software engineering at the
University of Warwick. In 2006 Doron returned to Israel and joined Bar-Ilan University as a professor
of computer science.
Doron Peled is a computer science Professor at Bar-Ilan
University. His research interests include formal methods, model checking, program synthesis and
runtime verification. He obtained his D.Sc in computer science from the Technion - Israel Institute of
Technology in 1991 under the supervision of Prof. Shmuel Katz and Prof. Amir Pnueli on verification
methods in temporal logic. After a post-doctoral year at the University of Warwick, he joined Bell
Labs, where he worked between 1992 and 2001. He was then appointed as an associated professor at the
University of Texas at Austin and after a year to a professor and chair of software engineering at the
University of Warwick. In 2006 Doron returned to Israel and joined Bar-Ilan University as a professor
of computer science. Bettina Könighofer is a Senior Researcher at
Lamarr Security Research and Graz University of Technology in Austria. She has been teaching
undergraduate courses since 2012. Her research interests lie in the area of AI especially in
reinforcement learning, formal verification, model checking, and synthesis of hardware and software.
Bettina’s work on shielding was one of the first that combined formal runtime enforcement techniques
with AI, bootstrapping the line of research on shielded learning.
Bettina Könighofer is a Senior Researcher at
Lamarr Security Research and Graz University of Technology in Austria. She has been teaching
undergraduate courses since 2012. Her research interests lie in the area of AI especially in
reinforcement learning, formal verification, model checking, and synthesis of hardware and software.
Bettina’s work on shielding was one of the first that combined formal runtime enforcement techniques
with AI, bootstrapping the line of research on shielded learning. Georgios Fainekos is a Senior Principal
Scientist at Toyota Research Institute of North America (TRINA). He received his Ph.D. in Computer and
Information Science from the University of Pennsylvania in 2008 where he was affiliated with the GRASP
laboratory. He holds a Diploma degree (B.Sc. & M.Sc.) in Mechanical Engineering from the National
Technical University of Athens (NTUA). Among other professional roles, he has been a tenured faculty
at the School of Computing and Augmented Intelligence (SCAI) at Arizona State University (ASU), and a
Postdoctoral Researcher at NEC Laboratories America in the System Analysis & Verification Group. He is
currently working on Cyber-Physical Systems (CPS) and robotics with a focus on Automated Driving
Systems (ADS). His technical expertise is on applied logic, formal verification & requirements,
testing, control theory, artificial intelligence, and optimization. In 2013, Dr. Fainekos received the
NSF CAREER award and the ASU SCIDSE Best Researcher Junior Faculty Award. He has also been recognized
with the top 5% teacher award in 2019 and 2021. His research has received several awards and
nominations (e.g., IEEE CASE 2021, IEEE ITSC 2019, ACM HSCC 2019, IEEE/ACM MEMOCODE 2019), and the
2008 Frank Anger Memorial ACM SIGBED/SIGSOFT Student Award. In 2016, Dr. Fainekos was the program
co-Chair for the ACM International Conference on Hybrid Systems: Computation and Control (HSCC).
Georgios Fainekos is a Senior Principal
Scientist at Toyota Research Institute of North America (TRINA). He received his Ph.D. in Computer and
Information Science from the University of Pennsylvania in 2008 where he was affiliated with the GRASP
laboratory. He holds a Diploma degree (B.Sc. & M.Sc.) in Mechanical Engineering from the National
Technical University of Athens (NTUA). Among other professional roles, he has been a tenured faculty
at the School of Computing and Augmented Intelligence (SCAI) at Arizona State University (ASU), and a
Postdoctoral Researcher at NEC Laboratories America in the System Analysis & Verification Group. He is
currently working on Cyber-Physical Systems (CPS) and robotics with a focus on Automated Driving
Systems (ADS). His technical expertise is on applied logic, formal verification & requirements,
testing, control theory, artificial intelligence, and optimization. In 2013, Dr. Fainekos received the
NSF CAREER award and the ASU SCIDSE Best Researcher Junior Faculty Award. He has also been recognized
with the top 5% teacher award in 2019 and 2021. His research has received several awards and
nominations (e.g., IEEE CASE 2021, IEEE ITSC 2019, ACM HSCC 2019, IEEE/ACM MEMOCODE 2019), and the
2008 Frank Anger Memorial ACM SIGBED/SIGSOFT Student Award. In 2016, Dr. Fainekos was the program
co-Chair for the ACM International Conference on Hybrid Systems: Computation and Control (HSCC). Anastasios Tefas received the B.Sc. in
informatics in 1997 and the Ph.D. degree in informatics in 2002, both from the Aristotle University of
Thessaloniki, Greece and since January 2022 he has been a Professor at the Department of Informatics
of the same university. From 2017 until 2021 he was an Associate Professor and from 2008 to 2017 he
was a Lecturer at the Aristotle University of Thessaloniki, as well. From 2006 to 2008, he was an
Assistant Professor at the Department of Information Management, Technological Institute of Kavala.
From 2003 to 2004, he was a temporary lecturer in the Department of Informatics, University of
Thessaloniki. From 1997 to 2002, he was a researcher and teaching assistant in the Department of
Informatics, University of Thessaloniki. Dr. Tefas participated in 20 research projects financed by
national and European funds. He is the Coordinator of the H2020 project OpenDR, “Open Deep Learning
Toolkit for Robotics”. He is Area Editor in Signal Processing: Image Communications journal. He has
co-authored 135 journal papers, 247 papers in international conferences and contributed 8 chapters to
edited books in his area of expertise. Over 6500 citations have been recorded to his publications and
his H-index is 40 according to Google scholar. His current research interests include computational
intelligence, deep learning, pattern recognition, statistical machine learning, digital signal and
image analysis and retrieval and computer vision.
Anastasios Tefas received the B.Sc. in
informatics in 1997 and the Ph.D. degree in informatics in 2002, both from the Aristotle University of
Thessaloniki, Greece and since January 2022 he has been a Professor at the Department of Informatics
of the same university. From 2017 until 2021 he was an Associate Professor and from 2008 to 2017 he
was a Lecturer at the Aristotle University of Thessaloniki, as well. From 2006 to 2008, he was an
Assistant Professor at the Department of Information Management, Technological Institute of Kavala.
From 2003 to 2004, he was a temporary lecturer in the Department of Informatics, University of
Thessaloniki. From 1997 to 2002, he was a researcher and teaching assistant in the Department of
Informatics, University of Thessaloniki. Dr. Tefas participated in 20 research projects financed by
national and European funds. He is the Coordinator of the H2020 project OpenDR, “Open Deep Learning
Toolkit for Robotics”. He is Area Editor in Signal Processing: Image Communications journal. He has
co-authored 135 journal papers, 247 papers in international conferences and contributed 8 chapters to
edited books in his area of expertise. Over 6500 citations have been recorded to his publications and
his H-index is 40 according to Google scholar. His current research interests include computational
intelligence, deep learning, pattern recognition, statistical machine learning, digital signal and
image analysis and retrieval and computer vision. Roel Pieters received his Ph.D degree in Robotics
from Eindhoven University of technology (The Netherlands) in 2013. He is currently an Associate
Professor in robotics and leads the Cognitive Robotics research group. His research interests include
perception, cognition and autonomy for human-robot collaboration, applied in industrial and domestic
setting.
Roel Pieters received his Ph.D degree in Robotics
from Eindhoven University of technology (The Netherlands) in 2013. He is currently an Associate
Professor in robotics and leads the Cognitive Robotics research group. His research interests include
perception, cognition and autonomy for human-robot collaboration, applied in industrial and domestic
setting.
 In 2020, Thomas Peyrucain obtained a dual
degree in Mechatronics at ESIGELEC Engineering School (Rouen, France) and a Master in Robotics at
Cranfield University (Cranfield, England). In 2021 he joined PAL Robotics as a Robotics Engineer,
focusing on technical developments especially for the range of EU projects that PAL Robotics is
involved in.
In 2020, Thomas Peyrucain obtained a dual
degree in Mechatronics at ESIGELEC Engineering School (Rouen, France) and a Master in Robotics at
Cranfield University (Cranfield, England). In 2021 he joined PAL Robotics as a Robotics Engineer,
focusing on technical developments especially for the range of EU projects that PAL Robotics is
involved in.
 Stefania Pedrazzi received a BSc in Computer
Science and a MSc in Robotics at the ETH Zürich (Switzerland) in 2011. Since 2012 she's working at
Cyberbotics Ltd. contributing with several major improvements to the Webots robot simulator
functionality and developing simulation models in Webots. She also worked at the development of the
robotbenchmark.net web simulation platform and led the technical development in various projects to
create custom Webots simulation scenarios and interfaces for agricultural and industrial applications.
Stefania Pedrazzi received a BSc in Computer
Science and a MSc in Robotics at the ETH Zürich (Switzerland) in 2011. Since 2012 she's working at
Cyberbotics Ltd. contributing with several major improvements to the Webots robot simulator
functionality and developing simulation models in Webots. She also worked at the development of the
robotbenchmark.net web simulation platform and led the technical development in various projects to
create custom Webots simulation scenarios and interfaces for agricultural and industrial applications.
 Nikolaos Passalis received the B.Sc. degree in
informatics, the M.Sc. degree in information systems, and the Ph.D. degree in informatics from the
Aristotle University of Thessaloniki, Thessaloniki, Greece, in 2013, 2015, and 2018, respectively.
Since 2019, he has been a post-doctoral researcher with the Aristotle University of Thessaloniki,
while from 2018 to 2019 he also conducted post-doctoral research at the Faculty of Information
Sciences, Tampere University, Finland. He has (co)authored more than 30 journal articles and 45
conference papers. His research interests include deep learning, information retrieval, time-series
analysis and computational intelligence.
Nikolaos Passalis received the B.Sc. degree in
informatics, the M.Sc. degree in information systems, and the Ph.D. degree in informatics from the
Aristotle University of Thessaloniki, Thessaloniki, Greece, in 2013, 2015, and 2018, respectively.
Since 2019, he has been a post-doctoral researcher with the Aristotle University of Thessaloniki,
while from 2018 to 2019 he also conducted post-doctoral research at the Faculty of Information
Sciences, Tampere University, Finland. He has (co)authored more than 30 journal articles and 45
conference papers. His research interests include deep learning, information retrieval, time-series
analysis and computational intelligence.
 Moncef Gabbouj received his MS and PhD degrees in
electrical engineering from Purdue University, in 1986 and 1989, respectively. Dr. Gabbouj is
Professor of Signal Processing at the Department of Computing Sciences, Tampere University, Finland.
His research interests include Big Data analytics, multimedia analysis, artificial intelligence,
machine learning, and pattern recognition.
Moncef Gabbouj received his MS and PhD degrees in
electrical engineering from Purdue University, in 1986 and 1989, respectively. Dr. Gabbouj is
Professor of Signal Processing at the Department of Computing Sciences, Tampere University, Finland.
His research interests include Big Data analytics, multimedia analysis, artificial intelligence,
machine learning, and pattern recognition. Charalampos Symeonidis obtained his BsC in
Informatics in 2017 from the Aristotle University of Thessaloniki and he is currently pursuing his PhD
in Computational Intelligence at the Informatics Department of Aristotle University of Thessaloniki.
His research focuses on computer graphics, machine learning and computer vision.
Charalampos Symeonidis obtained his BsC in
Informatics in 2017 from the Aristotle University of Thessaloniki and he is currently pursuing his PhD
in Computational Intelligence at the Informatics Department of Aristotle University of Thessaloniki.
His research focuses on computer graphics, machine learning and computer vision.
 Paraskevi Nousi obtained her B.Sc. and Ph.D.
degree in Informatics from the Aristotle University of Thessaloniki in 2014 and 2021 respectively. She
is currently a post-doctoral researcher in the Artificial Intelligence and Information Analysis
Laboratory in the Department of Informatics at the Aristotle University of Thessaloniki. Her research
interests include deep learning for computer vision, robotics, financial forecasting and gravitational
waves analysis.
Paraskevi Nousi obtained her B.Sc. and Ph.D.
degree in Informatics from the Aristotle University of Thessaloniki in 2014 and 2021 respectively. She
is currently a post-doctoral researcher in the Artificial Intelligence and Information Analysis
Laboratory in the Department of Informatics at the Aristotle University of Thessaloniki. Her research
interests include deep learning for computer vision, robotics, financial forecasting and gravitational
waves analysis. Gizem Bozdemir graduated in Economics and
Administrative Science at the University of Selçuk (Turkey) in 2012, and she obtained a master's
degree in Business Administration and Management at ENEB Business School Barcelona in 2022. She
specializes in EU Project Management and Business Development. Gizem has 5 years of experience working
with EU funded projects. She joined PAL Robotics in 2021 as EU Project Coordinator and is dedicated to
coordination of PAL Robotics´s collaborative R&D projects. She is in charge of preparation and
submission of the proposals as well as the coordination of the projects within Horizon Europe and
other EU funding programmes.
Gizem Bozdemir graduated in Economics and
Administrative Science at the University of Selçuk (Turkey) in 2012, and she obtained a master's
degree in Business Administration and Management at ENEB Business School Barcelona in 2022. She
specializes in EU Project Management and Business Development. Gizem has 5 years of experience working
with EU funded projects. She joined PAL Robotics in 2021 as EU Project Coordinator and is dedicated to
coordination of PAL Robotics´s collaborative R&D projects. She is in charge of preparation and
submission of the proposals as well as the coordination of the projects within Horizon Europe and
other EU funding programmes. Jens Kober is an associate professor at TU Delft,
Netherlands. He is member of the Cognitive Robotics department (CoR), the TU Delft Robotics Institute,
and RoboValley. Jens is the recipient of the Robotics: Science and Systems Early Career Award 2022 and
the IEEE-RAS Early Academic Career Award in Robotics and Automation 2018. His Ph.D. thesis has won the
2013 Georges Giralt PhD Award as the best Robotics PhD thesis in Europe in 2012. Jens was an assistant
professor at TU Delft (2015-2019), first at the Delft Center for Systems and Control (DCSC) and later
at CoR. He worked as a postdoctoral scholar (2012-2014) jointly at the CoR-Lab, Bielefeld University,
Germany and at the Honda Research Institute Europe, Germany. Jens holds degrees (MSc equivalent) in
control engineering from University of Stuttgart and in general engineering from the École Centrale
Paris (ECP). He has been a visiting research student at the Advanced Telecommunication Research (ATR)
Center, Japan and an intern at Disney Research Pittsburgh, USA. Jens is an IEEE Senior Member and
ELLIS Scholar. Jens served as co-chair of the IEEE-RAS TC Robot Learning (2016-2021), as the Virtual
Conference Arrangements Chair for Robotics: Science and Systems 2020, and as a Program Chair for the
Conference on Robot Learning 2020. He currently serves as the Finance Chair for the International
Conference on Advanced Intelligent Mechatronics 2021, as senior editor for the IEEE Robotics and
Automation Letters, as associate editor for the IEEE Transactions on Robotics and for the IEEE/ASME
Transactions on Mechatronics, as editorial board member of the Journal of Machine Learning Research,
as editor for the IEEE/RSJ International Conference on Intelligent Robots and Systems, as well as area
chair/associate editor for numerous conferences. He has served as reviewer for most well-known
journals and conferences in the fields of machine learning and robotics. From 2007-2012 he was working
with Jan Peters as a master's student and subsequently as a Ph.D. student at the Robot Learning Lab,
Max-Planck Institute for Intelligent Systems, Empirical Inference Department (formerly part of the MPI
for Biological Cybernetics) and Autonomous Motion Department. Jens has graduated in Spring 2012 with a
Doctor of Engineering “summa cum laude” from the Intelligent Autonomous Systems Group, Technische
Universität Darmstadt.
Jens Kober is an associate professor at TU Delft,
Netherlands. He is member of the Cognitive Robotics department (CoR), the TU Delft Robotics Institute,
and RoboValley. Jens is the recipient of the Robotics: Science and Systems Early Career Award 2022 and
the IEEE-RAS Early Academic Career Award in Robotics and Automation 2018. His Ph.D. thesis has won the
2013 Georges Giralt PhD Award as the best Robotics PhD thesis in Europe in 2012. Jens was an assistant
professor at TU Delft (2015-2019), first at the Delft Center for Systems and Control (DCSC) and later
at CoR. He worked as a postdoctoral scholar (2012-2014) jointly at the CoR-Lab, Bielefeld University,
Germany and at the Honda Research Institute Europe, Germany. Jens holds degrees (MSc equivalent) in
control engineering from University of Stuttgart and in general engineering from the École Centrale
Paris (ECP). He has been a visiting research student at the Advanced Telecommunication Research (ATR)
Center, Japan and an intern at Disney Research Pittsburgh, USA. Jens is an IEEE Senior Member and
ELLIS Scholar. Jens served as co-chair of the IEEE-RAS TC Robot Learning (2016-2021), as the Virtual
Conference Arrangements Chair for Robotics: Science and Systems 2020, and as a Program Chair for the
Conference on Robot Learning 2020. He currently serves as the Finance Chair for the International
Conference on Advanced Intelligent Mechatronics 2021, as senior editor for the IEEE Robotics and
Automation Letters, as associate editor for the IEEE Transactions on Robotics and for the IEEE/ASME
Transactions on Mechatronics, as editorial board member of the Journal of Machine Learning Research,
as editor for the IEEE/RSJ International Conference on Intelligent Robots and Systems, as well as area
chair/associate editor for numerous conferences. He has served as reviewer for most well-known
journals and conferences in the fields of machine learning and robotics. From 2007-2012 he was working
with Jan Peters as a master's student and subsequently as a Ph.D. student at the Robot Learning Lab,
Max-Planck Institute for Intelligent Systems, Empirical Inference Department (formerly part of the MPI
for Biological Cybernetics) and Autonomous Motion Department. Jens has graduated in Spring 2012 with a
Doctor of Engineering “summa cum laude” from the Intelligent Autonomous Systems Group, Technische
Universität Darmstadt.
 Alexandros Iosifidis is a Professor at Aarhus
University, Denmark. He leads the Machine Learning & Computational Intelligence group at the
Department of Electrical and Computer Engineering, and the Machine Intelligence research area of the
University's Centre for Digitalisation, Big Data and Data Analytics (DIGIT). He has contributed to
more than thirty R&D projects financed by EU, Finnish, and Danish funding agencies and companies. He
has co-authored more than 235 papers in in international journals/conferences/workshops in topics of
his expertise. He is a co-Editor of the Deep Learning for Robot Perception and Cognition book
(Academic Press, 2022). Alexandros is the Associate Editor in Chief (for neural networks) of the
Neurocomputing journal, and an Associate Editor of IEEE Transactions on Neural Networks and Learning
Systems, and of Image Communication journal. He contributed to the organization of international
conferences , as an Area Chair or Technical Program Committee Chair, including IEEE ICIP (2018-2022)
and EUSIPCO (2019,2021), and as Publicity co-Chair for IEEE ICME 2021. His work received several
awards, including the Academy of Finland Postdoctoral Research Fellowship 2016, the H.C. Ørsted Young
Researcher Prize 2018 for contributions to Signal Processing and Machine Learning, the EURASIP Early
Career Award 2021 for contributions to Statistical Machine Learning and Artificial Neural Networks,
the JP Morgan Faculty Research Award 2022 for work in Bayesian Deep Learning for Financial
forecasting, and he is a Senior Member of the Institute of Electrical and Electronics Engineers
(IEEE). His research interests include statistical machine learning and deep learning finding
applications in problems coming from comptuer/robot vision, ecology and finance.
Alexandros Iosifidis is a Professor at Aarhus
University, Denmark. He leads the Machine Learning & Computational Intelligence group at the
Department of Electrical and Computer Engineering, and the Machine Intelligence research area of the
University's Centre for Digitalisation, Big Data and Data Analytics (DIGIT). He has contributed to
more than thirty R&D projects financed by EU, Finnish, and Danish funding agencies and companies. He
has co-authored more than 235 papers in in international journals/conferences/workshops in topics of
his expertise. He is a co-Editor of the Deep Learning for Robot Perception and Cognition book
(Academic Press, 2022). Alexandros is the Associate Editor in Chief (for neural networks) of the
Neurocomputing journal, and an Associate Editor of IEEE Transactions on Neural Networks and Learning
Systems, and of Image Communication journal. He contributed to the organization of international
conferences , as an Area Chair or Technical Program Committee Chair, including IEEE ICIP (2018-2022)
and EUSIPCO (2019,2021), and as Publicity co-Chair for IEEE ICME 2021. His work received several
awards, including the Academy of Finland Postdoctoral Research Fellowship 2016, the H.C. Ørsted Young
Researcher Prize 2018 for contributions to Signal Processing and Machine Learning, the EURASIP Early
Career Award 2021 for contributions to Statistical Machine Learning and Artificial Neural Networks,
the JP Morgan Faculty Research Award 2022 for work in Bayesian Deep Learning for Financial
forecasting, and he is a Senior Member of the Institute of Electrical and Electronics Engineers
(IEEE). His research interests include statistical machine learning and deep learning finding
applications in problems coming from comptuer/robot vision, ecology and finance.
 Erdal Kayacan received a B.Sc. degree in electrical
engineering from Istanbul Technical University, Istanbul, Turkey, in 2003 and a M.Sc. degree in
systems and control engineering from Bogazici University, Istanbul, Turkey, in 2006. In September
2011, he received a Ph.D degree in electrical and electronic engineering at Bogazici University,
Istanbul, Turkey. After finishing his post-doctoral research in KU Leuven at the division of
mechatronics, biostatistics and sensors (MeBioS) in 2014, he worked in Nanyang Technological
University at the School of Mechanical and Aerospace Engineering as an assistant professor for four
years. Currently, he is pursuing his research in Aarhus University at the Department of Engineering as
an associate professor. Dr. Kayacan is co-writer of a course book “Fuzzy Neural Networks for Real Time
Control Applications, 1st Edition Concepts, Modeling and Algorithms for Fast Learning“,
Butterworth-Heinemann, Print Book ISBN:9780128026878. (17 Sept 2015). He is a Senior Member of
Institute of Electrical and Electronics Engineers (IEEE). From 1st Jan 2017, he is an Associate Editor
of IEEE Transactions on Fuzzy Systems. His research areas are computational intelligence methods,
sliding mode control, model predictive control, mechatronics and unmanned aerial vehicles.
Erdal Kayacan received a B.Sc. degree in electrical
engineering from Istanbul Technical University, Istanbul, Turkey, in 2003 and a M.Sc. degree in
systems and control engineering from Bogazici University, Istanbul, Turkey, in 2006. In September
2011, he received a Ph.D degree in electrical and electronic engineering at Bogazici University,
Istanbul, Turkey. After finishing his post-doctoral research in KU Leuven at the division of
mechatronics, biostatistics and sensors (MeBioS) in 2014, he worked in Nanyang Technological
University at the School of Mechanical and Aerospace Engineering as an assistant professor for four
years. Currently, he is pursuing his research in Aarhus University at the Department of Engineering as
an associate professor. Dr. Kayacan is co-writer of a course book “Fuzzy Neural Networks for Real Time
Control Applications, 1st Edition Concepts, Modeling and Algorithms for Fast Learning“,
Butterworth-Heinemann, Print Book ISBN:9780128026878. (17 Sept 2015). He is a Senior Member of
Institute of Electrical and Electronics Engineers (IEEE). From 1st Jan 2017, he is an Associate Editor
of IEEE Transactions on Fuzzy Systems. His research areas are computational intelligence methods,
sliding mode control, model predictive control, mechatronics and unmanned aerial vehicles. Nikos Nikolaidis received the Diploma of
Electrical Engineering and the Ph.D. degree in Electrical Engineering from the Aristotle University of
Thessaloniki, Thessaloniki, Greece, in 1991 and 1997, respectively. He is currently Associate
Professor at the Department of Informatics, Aristotle University of Thessaloniki. He has coauthored 1
book, 15 book chapters, 61 journal papers and 189 conference papers and co-edited one book and two
special issues in journals. Moreover he has co-organized 6 special sessions in international
conferences. The number of citations to his work by third authors exceeds 6600 (h-index 35, Source:
Google Scholar). He has participated into 25 research projects funded by mainly by EU but also
national funds. His current areas of interest include computer/robot vision, image/video processing
and analysis, analysis of motion capture data, computer graphics and visualization. Dr. Nikolaidis is
currently serving as associate/area editor for Signal Processing: Image Communication and EURASIP
Journal on Image and Video Processing. He served as Technical Program chair of IEEE IVMSP 2013
workshop, and Publicity co-chair of EUSIPCO 2015 and IEEE ICIP 2018. Dr. Nikolaidis is a Senior Member
of IEEE.
Nikos Nikolaidis received the Diploma of
Electrical Engineering and the Ph.D. degree in Electrical Engineering from the Aristotle University of
Thessaloniki, Thessaloniki, Greece, in 1991 and 1997, respectively. He is currently Associate
Professor at the Department of Informatics, Aristotle University of Thessaloniki. He has coauthored 1
book, 15 book chapters, 61 journal papers and 189 conference papers and co-edited one book and two
special issues in journals. Moreover he has co-organized 6 special sessions in international
conferences. The number of citations to his work by third authors exceeds 6600 (h-index 35, Source:
Google Scholar). He has participated into 25 research projects funded by mainly by EU but also
national funds. His current areas of interest include computer/robot vision, image/video processing
and analysis, analysis of motion capture data, computer graphics and visualization. Dr. Nikolaidis is
currently serving as associate/area editor for Signal Processing: Image Communication and EURASIP
Journal on Image and Video Processing. He served as Technical Program chair of IEEE IVMSP 2013
workshop, and Publicity co-chair of EUSIPCO 2015 and IEEE ICIP 2018. Dr. Nikolaidis is a Senior Member
of IEEE. Jenni Raitoharju received her PhD in Information
Technology from Tampere University of Technology in 2017. She is an Assistant Professor of Signal
Processing at University of Jyväskylä, Finland and a Senior Research Scientist at the Finnish
Environment Institute, Finland. Her research interests include machine learning and pattern
recognition methods along with applications in biomonitoring and autonomous systems.
Jenni Raitoharju received her PhD in Information
Technology from Tampere University of Technology in 2017. She is an Assistant Professor of Signal
Processing at University of Jyväskylä, Finland and a Senior Research Scientist at the Finnish
Environment Institute, Finland. Her research interests include machine learning and pattern
recognition methods along with applications in biomonitoring and autonomous systems. Daniel Honerkamp obtained his BA Economics from
the Universiy of Zurich in 2016 and graduated from the MSc Computational Statistics And Machine
Learning (CSML) from University College London in 2018. He continued on to work at the intersection of
distributed systems, mechanism design and intelligent agents at Fetch.AI, Cambridge where he developed
consensus protocols and incentive mechanisms for autonomous economic agents. He is currently a PhD
student in the Robot Learning Lab at the University of Freiburg, where his research focuses on mobile
manipulation and embodied AI to develop autonomous robotic agents for the real world.
Daniel Honerkamp obtained his BA Economics from
the Universiy of Zurich in 2016 and graduated from the MSc Computational Statistics And Machine
Learning (CSML) from University College London in 2018. He continued on to work at the intersection of
distributed systems, mechanism design and intelligent agents at Fetch.AI, Cambridge where he developed
consensus protocols and incentive mechanisms for autonomous economic agents. He is currently a PhD
student in the Robot Learning Lab at the University of Freiburg, where his research focuses on mobile
manipulation and embodied AI to develop autonomous robotic agents for the real world.
 Abhinav Valada -
Abhinav Valada - Alea Scovill --
Alea Scovill --